Komme i gang – PhotoRobot brukerstøtte
PhotoRobot Controls App (heretter referert til som «CAPP») er designet for å automatisere innholdsproduksjonsprosesser (bilder, videoer, 360-er og 3D-modeller). Denne veiledningen består av 4 seksjoner, som hver representerer prosessen.
- OPPSETT - Opprett et arbeidsområde: kameraer, maskinvare og prosjekter
- CAPTURE - Kontroller PhotoRobot maskinvare og kameraer, ta bilder og video
- REDIGER - Visuelt innhold etter prosess
- PUBLISH - Generer utdatabilder i flere formater, "administrer profiler"
Installere PhotoRobot Controls-appen
For å installere PhotoRobot Controls-appen på datamaskinen din, logg inn på PhotoRobot-kontoen din og gå til PhotoRobot-nedlastinger.
Notat: Både den stabile versjonen og en forhåndsvisningsversjon av CAPP er tilgjengelige for nedlasting via installasjonsveiviseren. Den stabile versjonen inneholder den nyeste versjonen av CAPP, og mottar hyppige versjonsutgivelser. I mellomtiden gir forhåndsvisningsversjonen av CAPP tidlig tilgang til de aller nyeste funksjonene og rettelsene som overføres til den stabile versjonen i løpet av dager etter utvikling. Dette lar brukere teste eventuelle problemer som oppstår i forhåndsvisningsversjonen før de kontakter kundestøtte, siden de fleste rapporterte problemer på den stabile versjonen allerede er løst på forhåndsvisningsversjonen. Vær imidlertid oppmerksom på at forhåndsvisningsversjonen ikke anbefales for produksjonsbruk der stabilitet er en kritisk faktor. Forhåndsvisningsversjonen er under aktiv utvikling, som fortsatt kan inneholde ufullstendige funksjoner eller uløste feil.
Viktig: De eldre versjonene av CAPP er ikke ment for kunde- eller offentlig distribusjon på grunn av risikoen for databasekorrupsjon. Eldre versjoner av CAPP er kun tilgjengelige for autoriserte PhotoRobot-teknikere for intern utvikling, eller for ekstremt spesielle brukstilfeller.
For å finne den nyeste stabile versjonen og forhåndsversjonen av CAPP, se CAPP Siste nedlastingsversjoner.
Støtte og feilsøking for selvinstallasjon
Installasjonsprosessen begynner med å laste ned installasjonsfilen.
Legg merke til kravene for installasjon av CAPP:
- Brukeren må ha administratorrettigheter på datamaskinen som installerer CAPP.
- Datamaskinen må oppfylle alle PhotoRobot-system- og maskinvarekrav.
- Datamaskinen må kjøre et støttet operativsystem med de siste oppdateringene.
Viktig: Vær også oppmerksom på at CAPP ikke bare består av robotkontrollfunksjoner, men også drivere for kameraer, lys og annet periferiutstyr. Som et resultat støttes ofte ikke den nyeste Mac OS-versjonen umiddelbart. Hvis dette skjer, er det imidlertid bare midlertidig og inntil alle relevante leverandører frigir de kompatible bibliotekene.
Selv om dette kan være upraktisk, er det langt mindre upraktisk enn kompatibilitetsproblemer når du bruker CAPP. Nedgradering er også enda mer komplisert enn å unngå en for tidlig oppgradering.
Etter å ha oppfylt operativsystemet og systemkravene, fortsetter installasjonen via installasjonsveiviseren. Logg på PhotoRobot-kontoen, og fortsett deretter med oppsettet ved å følge trinnene nedenfor.
Installasjonsprogrammet
Bekreftelse av brukersamtykke
Når du laster ned CAPP, krever aktivering av en ny brukerkonto brukerbekreftelse av sluttbrukerlisensavtalen (EULA) og andre relaterte dokumenter.
Etter kontoaktivering er det mulig å gjennomgå din innsendte samtykkeinformasjon via Cloud-versjonen av CAPP i kontoprofilinnstillingene.
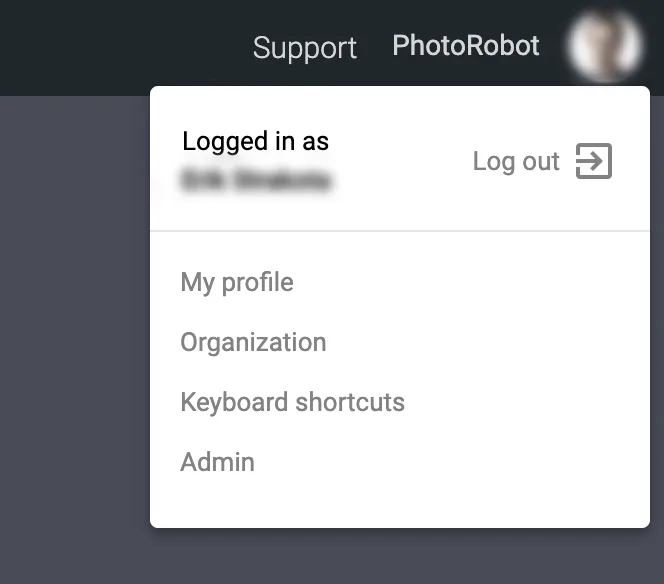
For å sjekke samtykkeinformasjonen din, åpne skyversjonen av CAPP og klikk på brukerkontoikonet øverst til høyre i grensesnittet. Deretter velger du Min profil fra menyalternativene.

Profilmenyen vil vise profilbildet, generell brukerinformasjon (navn, telefon, firma), passordinnstillinger og samtykkeinformasjon. Samtykkeinformasjon inkluderer:
- Datamaskinens vertsnavn
- Avtalt dato
- Lisensavtale for PhotoRobot International Program
- Samtykke til behandling av personopplysninger
- Informasjon om behandling av personopplysninger
Kompatible kameraer
Viktig: For å sikre at CAPP kommuniserer med kameraet på riktig måte, må du lukke alle andre programmer som kobles til kameraet. Sørg også for å bruke et kompatibelt kamera fra listen over PhotoRobot-kompatible kameramodeller.
Merk: Fra og med utgivelsen av PhotoRobot Controls App 2.5.4 kan ethvert kamera nå støttes via tredjeparts kameraintegrasjon. For automatisert fotografering er imidlertid de nyeste speilløse Canon-kameramodellene de mest pålitelige og effektive.
Selv om det er mulig å bruke PhotoRobot foreslåtte håndholdte kameraer over Wi-Fi eller kabeltilkobling, kan det skape problemer.
- Det kan være hyppige Wi-Fi-frakoblinger (først og fremst på grunn av tidsavbrudd). Disse krever tidkrevende nye tilkoblinger til systemet.
- Hvis du bruker et håndholdt kamera via kabeltilkobling, er det komplikasjoner med kabellengder og risiko for tilkoblinger.
For iPhone-tilkobling via PhotoRobot Touch App, merk at ingen av disse problemene oppstår. iPhone vil være i stand til håndholdt fotografering i et oppsett med kontinuerlig belysning. Men hvis blitsfotografering er nødvendig, kan kompatible håndholdte kameraer tjene som et alternativ til de anbefalte speilløse kameraene. Bare husk problemene som kan oppstå med Wi-Fi og kablede håndholdte modeller.
Kompatible lys
For at CAPP skal kommunisere med belysning, sørg for å bruke PhotoRobot-kompatible studiolys. Disse inkluderer to typer lys: strobelys fra FOMEI og Broncolor, og alle typer LED-lys med DMX-støtte.
Oppsett for fjernstøtte
Umiddelbart etter installasjon av PhotoRobot Controls anbefales det at brukeren laster ned og installerer Splashtop SOS (EU-region)-appen. Splashtop SOS (EU) lar PhotoRobot-teknikere få tilgang til en kundes datamaskin og gi teknisk assistanse etter at brukeren har gitt tillatelse for en spesifikk sak.
Nedlasting av Splashtop SOS samtidig som PhotoRobot Controls vil bidra til å unngå forsinkelser for forespørsler om ekstern teknisk støtte. Ta for eksempel når en bruker ikke har tilstrekkelige rettigheter til å installere applikasjonen. Etter installasjon av Splashtop kan våre teknikere umiddelbart bruke Splashtop Business for å få tilgang til datamaskinen med den tekniske støtteforespørselen.
Vær imidlertid oppmerksom på at brukeren må laste ned EU-regionversjonen av Splashtop SOS-appen. US-regionversjonen av appen tillater ikke teknikerne våre å få tilgang til datamaskinen din.
Sørg derfor for at du bruker følgende EU-regionlenke for å laste ned Splashtop SOS:
Merk: For mer informasjon om oppsett av fjernstøtte for PhotoRobot-systemer, se PhotoRobot Fjernstøtteoppsett.
Opprette et arbeidsområde
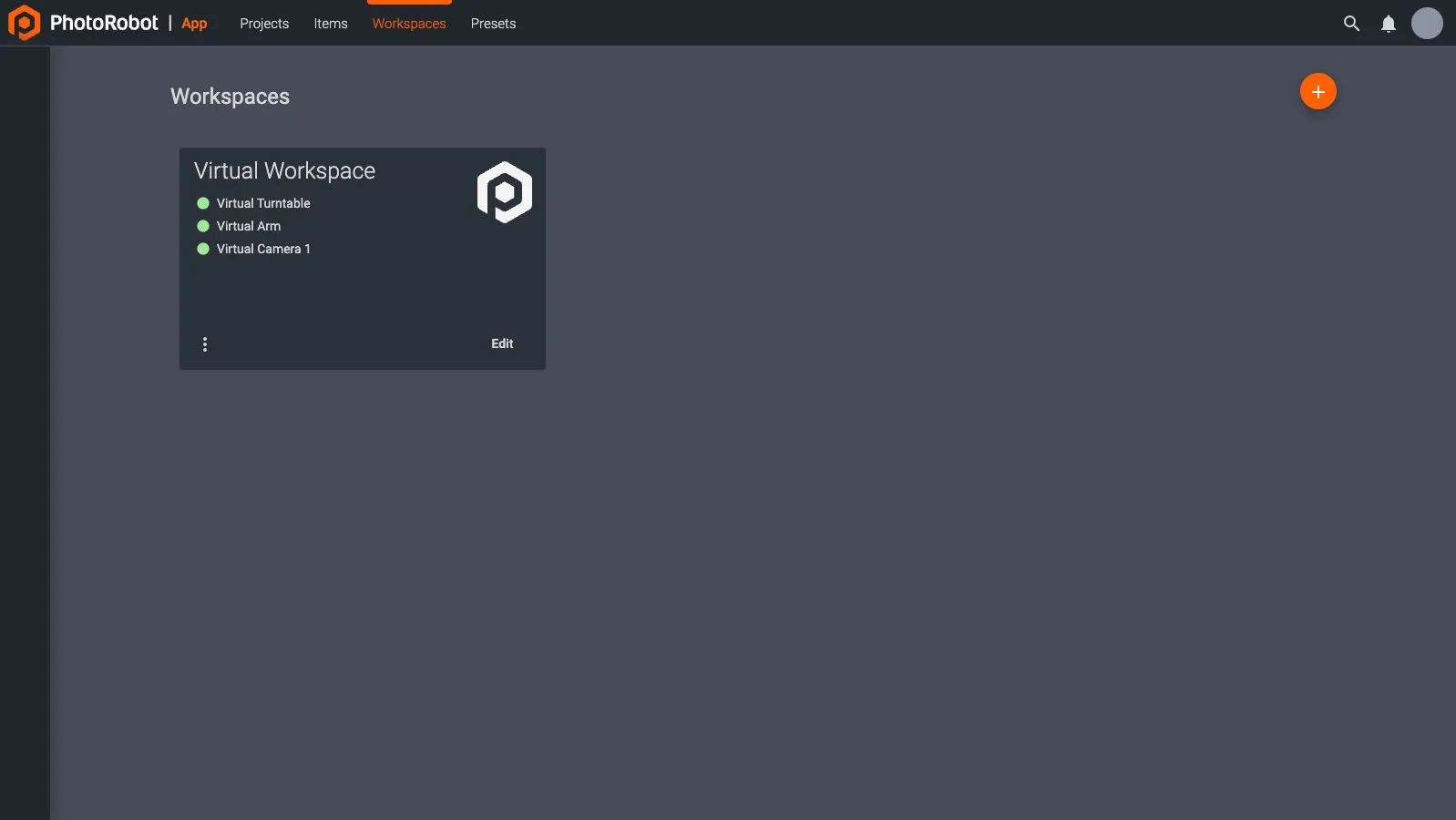
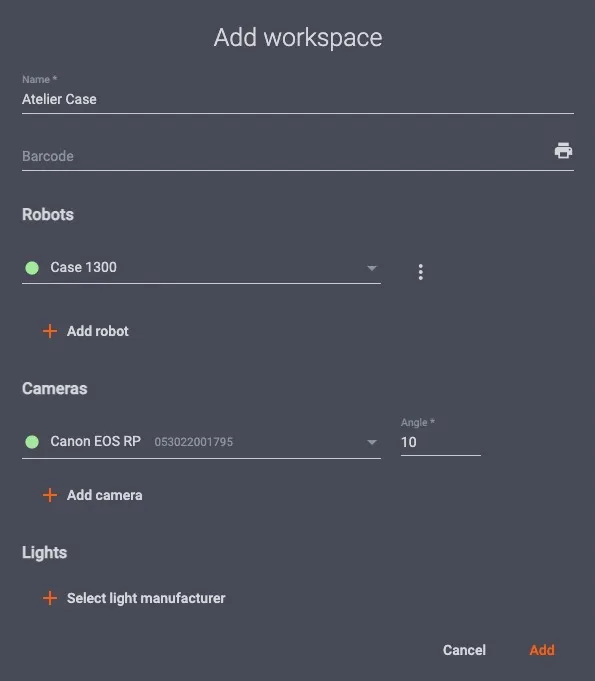
Etter å ha åpnet CAPP, er vanligvis det første en bruker gjør å opprette et arbeidsområde. Et arbeidsområde er en liste over maskinvare som brukes til en bestemt fotoseanse. Det kan inneholde forskjellige PhotoRobot moduler, kameraer, lys og annet tilbehør.
For demoformål kan brukere arbeide med et forhåndsdefinert eksempelarbeidsområde, som er konfigurert til å bruke virtuell maskinvare. På denne måten kan brukere fortsatt eksperimentere med forskjellige funksjoner i CAPP ved å velge virtuelle roboter og kameraer.
Kobler til maskinvare
For å begynne å bruke faktisk (i motsetning til virtuell) maskinvare, må du først sørge for at maskinvaren er koblet til samme datanettverk (eller et undernettverk) som datamaskinen du bruker til å kontrollere PhotoRobot.
Merk: Fra og med PhotoRobot Controls versjon 2.5.4, kan ethvert kamera nå støttes gjennom tredjeparts kameraintegrasjon. I mellomtiden inkluderer kompatible kameraer en rekke Canon-kameramodeller, våre anbefalte Wi-Fi-aktiverte Canon-kameraer, og også iPhone-kameraer hvis du bruker PhotoRobot Touch-appen.
Viktig: For automatisert fotografering med robotarbeidsstasjon er de PhotoRobot-anbefalte speilløse Canon-kameramodellene de mest pålitelige. Selv om det er støtte for håndholdte kameraer via Wi-Fi eller kabelforbindelse, kan bruken av dem skape problemer. Dette inkluderer hyppige Wi-Fi-frakoblinger (primært på grunn av tidsavbrudd), komplikasjoner med kabellengder og risiko for tilkoblinger.
For å koble til et kamera må det være koblet til det samme lokale datanettverket som roboten på en av tre måter:
- Direkte tilkobling via USB til lokalnettverket;
- Tilkobling av et anbefalt håndholdt kamera via en spesiell Wi-Fi-protokoll (tilgjengelig i Canons verktøyprogram på Canons utviklerside);
- Integrering av en eller flere iPhones via PhotoRobot Touch-applikasjonen. (For instruksjoner om bruk av en iPhone med PhotoRobot, se brukerhåndboken for iPhone Touch-appen.)
Etter å ha koblet en maskinvare (eller et kamera) til et arbeidsområde, kan du sjekke om det er online (gjenkjent av CAPP). For å gjøre dette, inspiser prikken til venstre for navnet på det aktuelle utstyret. Hvis enheten gjenkjennes, vil det være en grønn prikk.
En grå prikk ved siden av enhetsnavnet signaliserer at maskinvaren ikke ble gjenkjent eller ikke er slått på. Hvis det er en rød prikk, er det en feil, for eksempel at brukeren ikke har byttet kameraet til manuell modus. For å identifisere årsaken til feilen, hold musen over den røde prikken for å vise et verktøytips med en beskrivelse av feilen som oppstår.
For en komplett trinnvis veiledning om tilkobling av maskinvare for å sette opp et arbeidsområde, se Sette opp et PhotoRobot-arbeidsområde.
Hvis du opplever problemer, se PhotoRobot Feilsøking for vanlige problemer og deres løsninger.
Oppsett av robotarmhøyde
Hvis du bruker en robotarm i arbeidsområdet, må du være oppmerksom på at det sannsynligvis vil være nødvendig med ekstra oppsett. Dette er fordi robotarmen er en uavhengig maskin, og en av funksjonene ved å kontrollere den via CAPP er at høydebevegelsen justerer rotasjonsaksen til midtpunktet av det fotograferte objektets høyde.
Høyden på robotarmens rotasjonsakse bestemmes av arbeidsstasjonsmaskintypen, og samtidig av justeringen av nivelleringsføttene, som kompenserer for eventuelle ujevnheter i gulvet. Hvis alt er satt opp riktig, er maskinen i vater, og rotasjonssenteret er i en bestemt høyde over gulvet. Den totale høyden vil imidlertid også avhenge av høyden på platespillerens overflate, som varierer mellom ulike roboter. Dette betyr at det kan være et avvik i høydereferansen, siden det er en høydeadapter under søylen på robotarmen slik at den omtrent justeres.
For å sikre perfekt justering, blir det nødvendig å legge inn høydeforskjellen mellom armen og platespilleren i CAPP. Høydeforskjellen måler den nøyaktige avstanden mellom robotarmens rotasjonsakse og høyden som platespillerens overflate er plassert på (inkludert eventuelle ekstra brett plassert på toppen av den). Dette gir de nøyaktige dimensjonene som systemet beregner halvparten av objektets høyde fra, og posisjonen der armen skal bevege seg. Det sikrer også at systemet er satt til å fungere automatisk og riktig.
Merk også: Systemet er satt til å avvise verdier som faller utenfor det gyldige området for et gitt oppsett.
Sett Robotarmheisen til nullnivå
For å sette Robot ARM-heisen til nullnivå, åpne først den lokale versjonen av CAPP, og få tilgang til Arbeidsområdeinnstillinger på en av to måter:
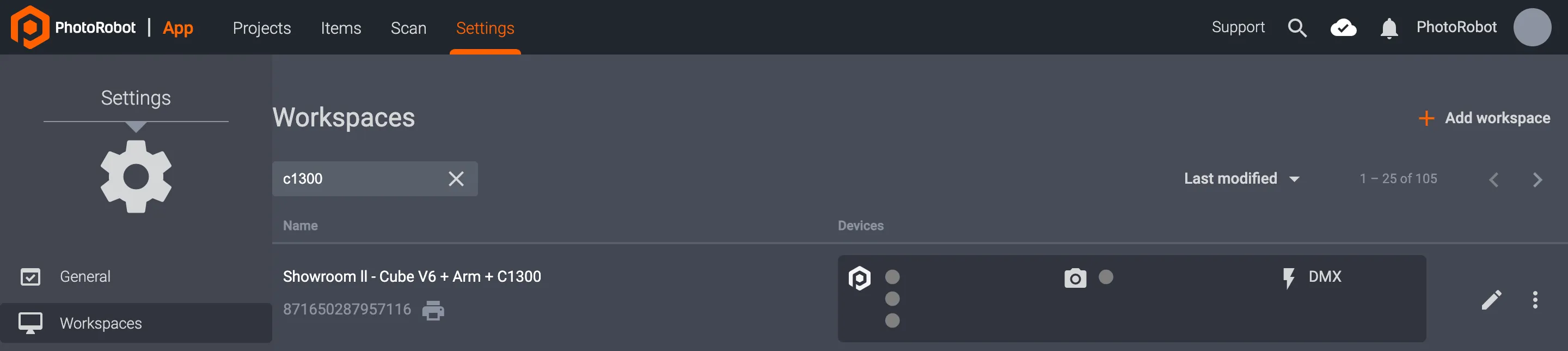
1. Åpne den lokale versjonen av CAPP, klikk på Innstillinger øverst i grensesnittet, og velg Arbeidsområder fra menyalternativene til venstre. I denne menyen finner du arbeidsområdet som er i drift, og klikker på redigeringsikonet ved siden av arbeidsområdetittelen for å åpne Rediger arbeidsområdeinnstillinger:
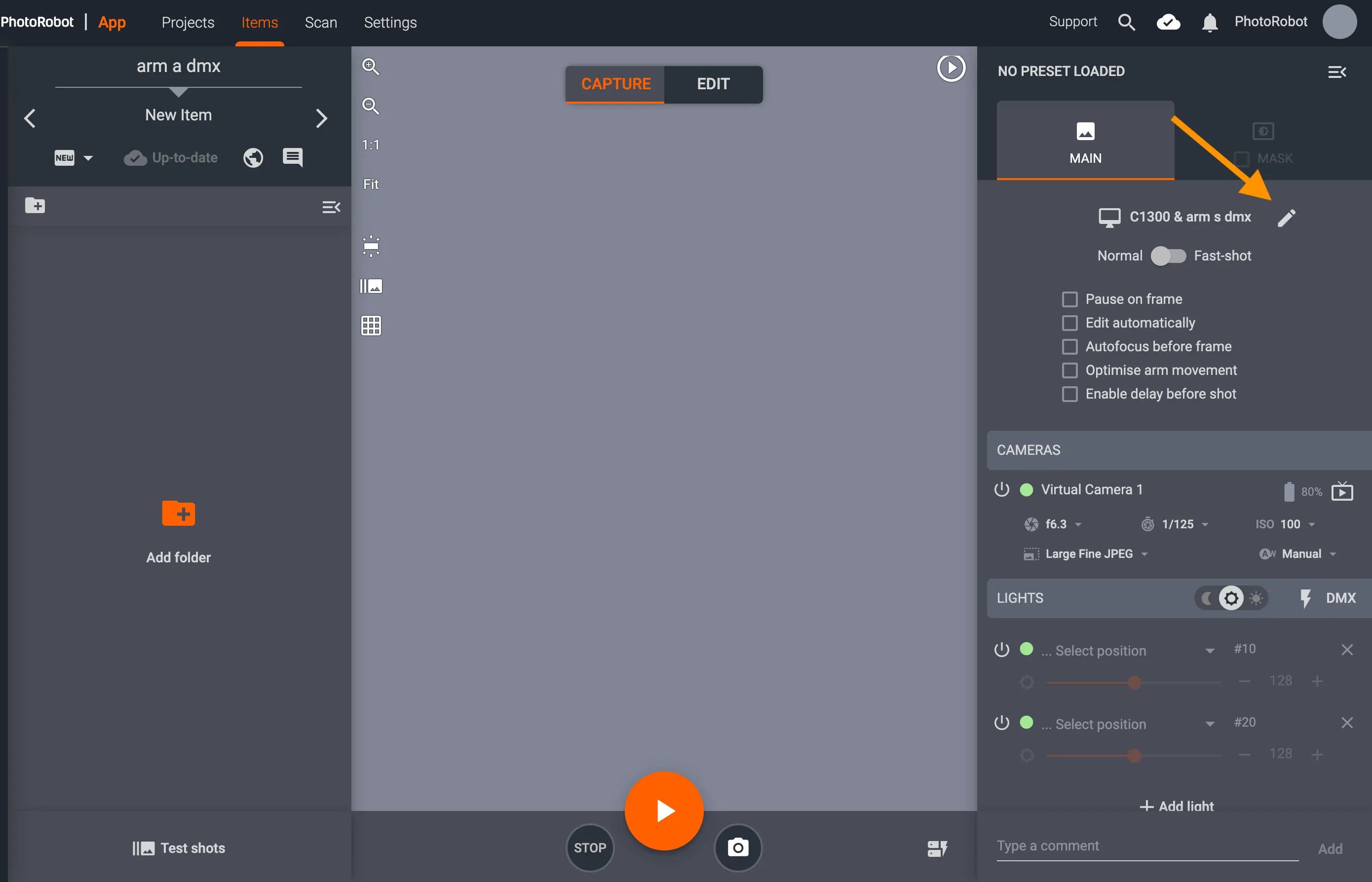
2. Alternativt er det mulig å få tilgang til Rediger arbeidsområde-menyen ved å åpne et element i opptaksmodus i den lokale versjonen av CAPP, og deretter klikke på redigeringsikonet ved siden av arbeidsområdetittelen på høyre side av grensesnittet:
Begge metodene åpner innstillingene for Rediger arbeidsområde. Deretter, for å konfigurere robotarmen, finn enheten under Roboter-menyen , og klikk på de 3 vertikale prikkene ved siden av robotarmens navn.
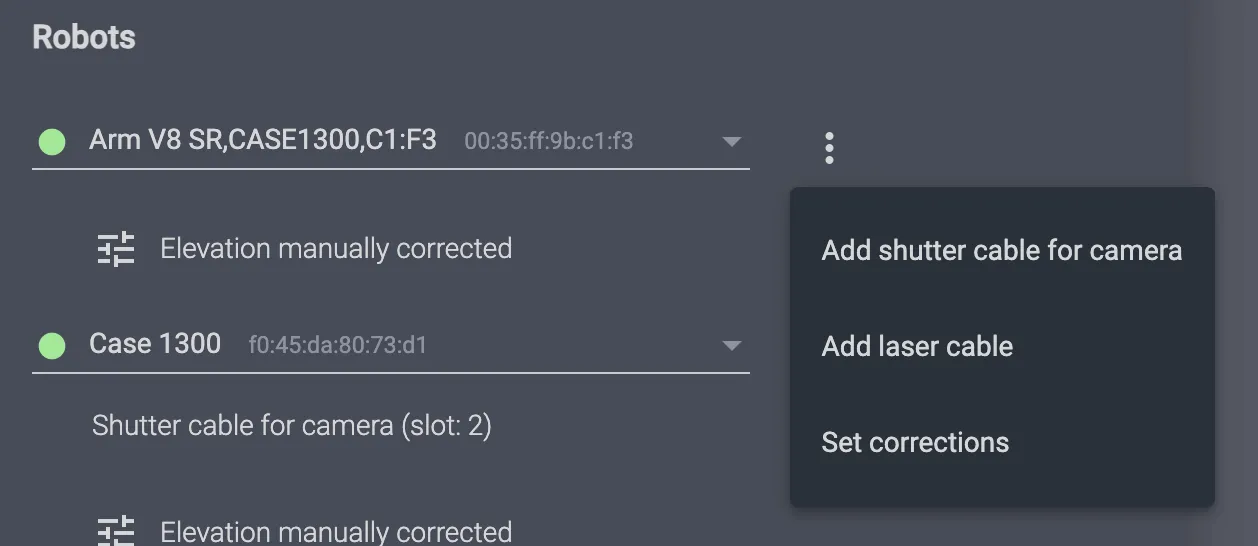
Deretter velger du menyvalget Angi korreksjoner for å åpne funksjonen Angi heiskorreksjon :
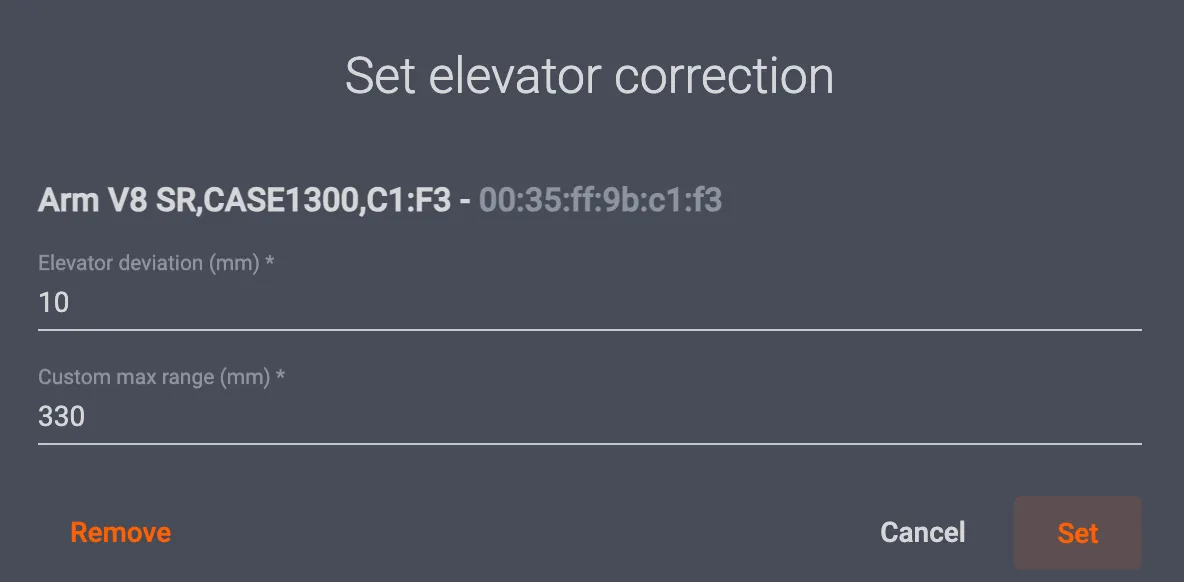
I menyen Angi heiskorreksjon justerer du tallet i det øverste feltet Heisavvik (mm) for å stille inn høyden på kameraet til riktig nullnivå. For eksample, hvis kameraet er utenfor midten med 10 mm over bordet, sett Heisavvik til -10 mm for å sentrere kameraet.
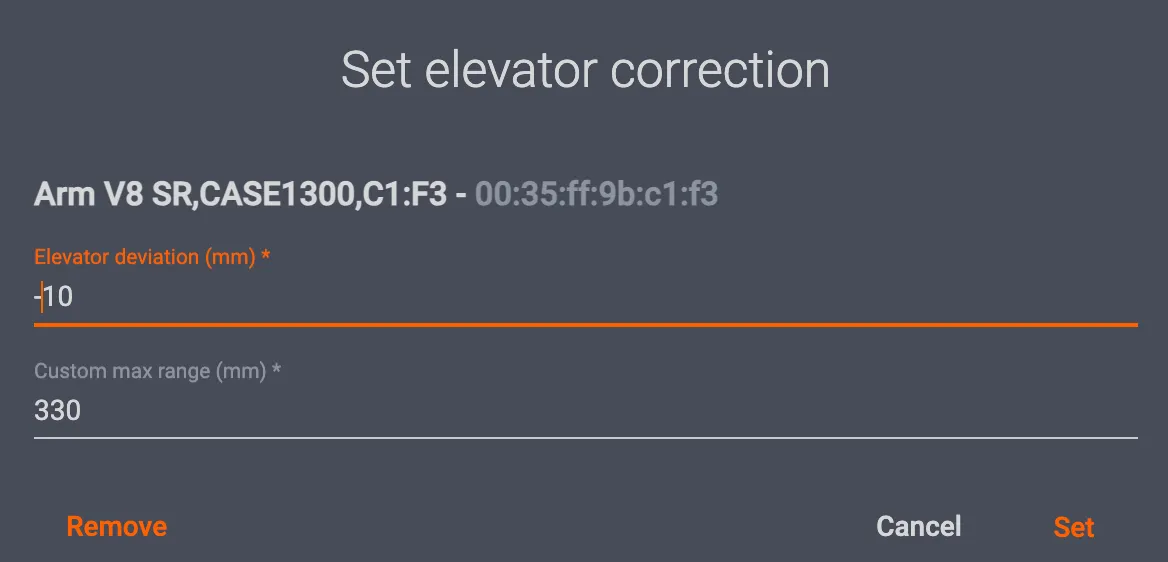
Hvis kameraet er utenfor midten med 10 mm under bordet, setter du Heisavvik til +10 mm. Dette vil justere høyden til det monterte kameraet på robotarmen til riktig nullnivå i programvaren.
Notat: Heisen kan nå maksimalt 330 mm. Hvis du justerer nullnivået med +30 mm, kan det maksimale løftet bare nå 300 mm. Dette betyr at systemet bare vil kunne fange opp produkter som er mindre med denne marginen, 30 mm eller mindre.
Behandle filer – prosjekter, elementer og mapper
I CAPP er bilder ordnet i prosjekter, elementer og mapper.
- Et prosjekt er dataenheten på høyeste nivå. Vanligvis vil et prosjekt inneholde elementer fra en enkelt fotoseanse eller kanskje en enkelt opptaksdag / uke.
- Prosjekter består av én eller flere varer. Ett enkelt element vil vanligvis være et bestemt, fotografert objekt.
- Et element inneholder én eller flere mapper. I CAPP kan du ha flere mapper i ett enkelt element for å holde forskjellige typer bilder atskilt. Et svært vanlig eksempel er å ha en mappe for en 360° roterende presentasjon (kalt "spinn"), mens du bruker en annen til å lagre stillbilder ("stillbilder").
For å begynne å skyte, må du først legge til et nytt prosjekt (med mindre du allerede har et du vil bruke), samt minst ett element.
( ! ) - Hvis du opplever problemer, kan du finne ytterligere støtte for tilkobling av kameraer, roboter, lys og redigering i PhotoRobot feilsøkingshåndbok.
Generelle innstillinger – automatisk sikkerhetskopiering i skyen, behandling, berøringsapp
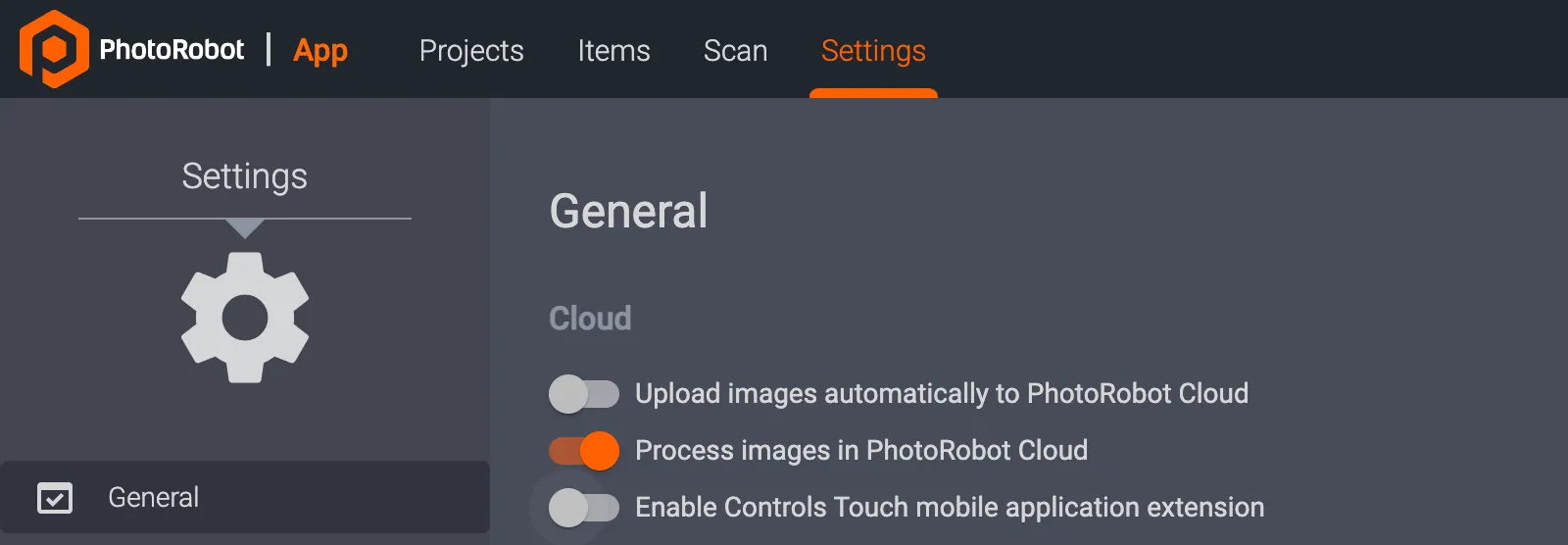
I den lokale skrivebordsversjonen av CAPP er det 3 generelle innstillinger for å slå på eller av:
- Last opp bilder automatisk til PhotoRobot Cloud
- Behandle bilder i PhotoRobot Cloud
- Aktiver kontroller Trykk på mobilapputvidelse
Som standard vil den lokale appen være satt til Last opp bilder automatisk til PhotoRobot Cloud. Denne funksjonen lagrer automatisk en sikkerhetskopi av bilder som er tatt, på skyserveren for senere eksport.
For å deaktivere Last opp bilder automatisk til PhotoRobot Cloud, slå av alternativet i den lokale versjonen av CAPPs generelle innstillinger. Dette vil i stedet lagre registrerte elementer i din lokale app eller på din egen skykonto.
Bruk bryterne også for å aktivere eller deaktivere funksjonen Behandle bilder i PhotoRobot Cloud. Når den er på, etterbehandler denne funksjonen automatisk bilder i henhold til forhåndsinnstillinger i PhotoRobot Cloud etter opptak.
Hvis du bruker PhotoRobot Touch-mobilapplikasjonen for iPhone, slår du på Aktiver kontroller Touch Mobile Application Extension.
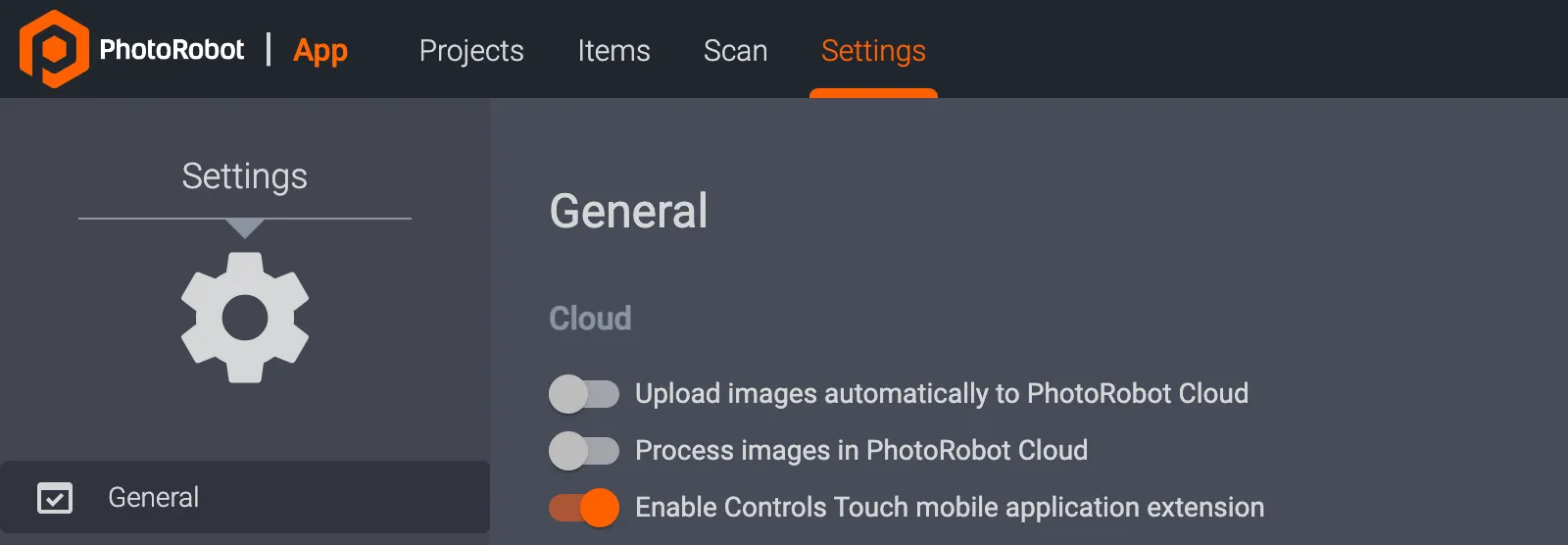
Notat: For tekniske instruksjoner om installasjon og drift av PhotoRobot Touch, se brukerhåndboken for PhotoRobot iPhone Touch App.
Generelle innstillinger - Opprett nytt element automatisk
I tillegg, i de generelle innstillingene i den lokale skrivebordsversjonen av CAPP, er det strekkodeskannerinnstillingene som muliggjør konfigurasjon av avanserte alternativer for strekkodeleseren. Bruk bryteren til venstre for Opprett automatisk et nytt element i systemet når en ukjent strekkode skannes for å aktivere eller deaktivere automatisk oppretting av element.
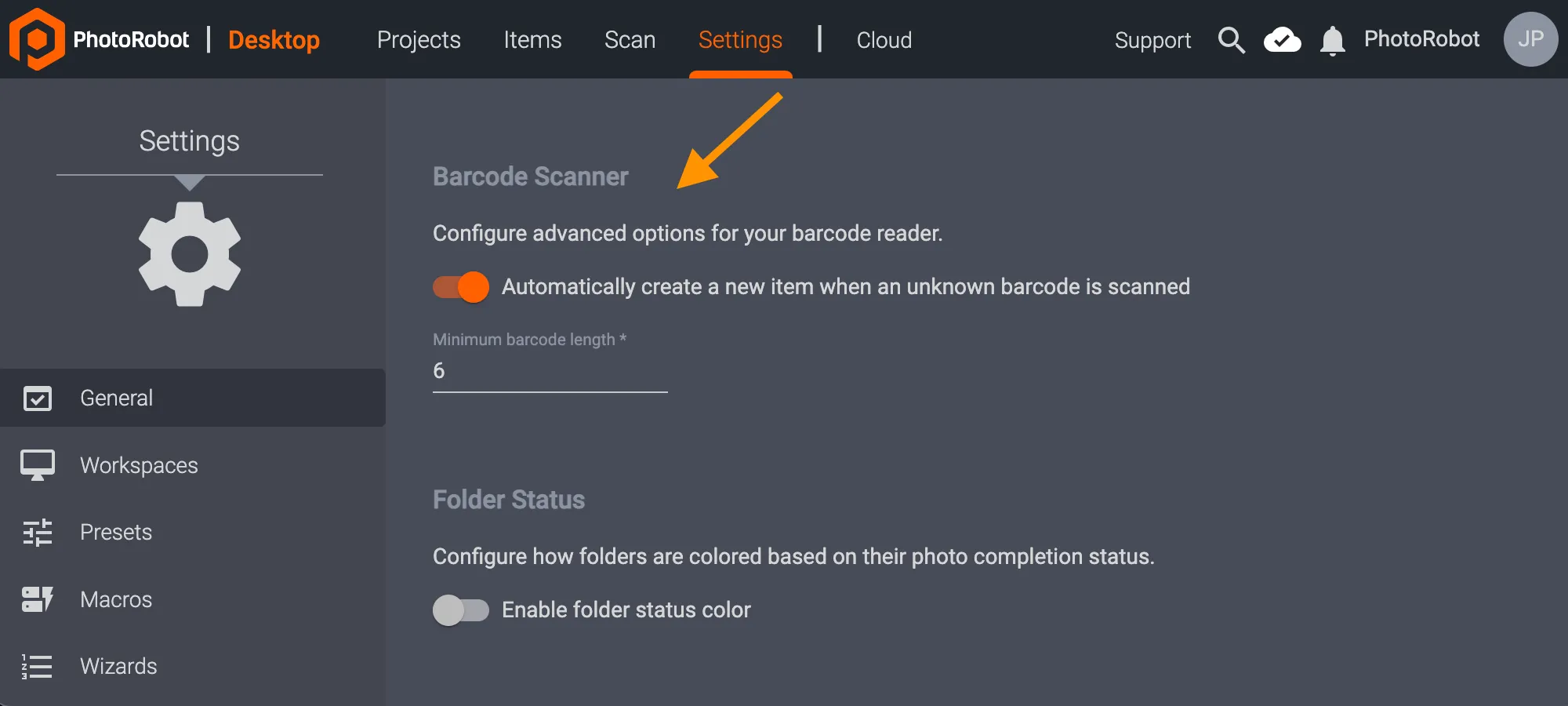
Når den er aktiv, vil innstillingen fungere som et alternativ til manuell oppretting av varer. Det muliggjør identifikasjon av en gjenstand ved fangstpunktet (vanligvis via strekkode eller QR-kode). En operatør skanner ganske enkelt en ukjent kode, og et nytt element opprettes automatisk i prosjektet. Navnet på elementet vil være i henhold til den skannede strengen og i elementets identifikatorfelt. Deretter fotograferer operatøren varen.
På denne måten er det ikke nødvendig å utføre noen inventarrelaterte operasjoner i studioprogramvaren. For eksempel er det nok å skanne et nytt element og deretter skanne en forhåndsinnstilt (hylle) kode for fotograferingen (f.eks. for hvite, mørke eller fargerike gjenstander). Systemet vil da automatisk og umiddelbart levere et komplett sett med fotografier, etterbehandle dem fullstendig og distribuere dem med automatisk navngivning til målsystemet.
Videre, fra og med CAPP versjon 2.13.beta58, er det nå muligheten til å konfigurere minimum strenglengde for strekkoder. Tidligere var minimum strekkode/QR-kodelengde 6 tegn (for å unngå doble tolkninger av den skannede strengen blant andre problemer). Nå er innstillingen Minimum strekkodelengde justerbar slik at for eksempel identifikatorer på fire tegn kan fungere uten behov for ytterligere justeringer.
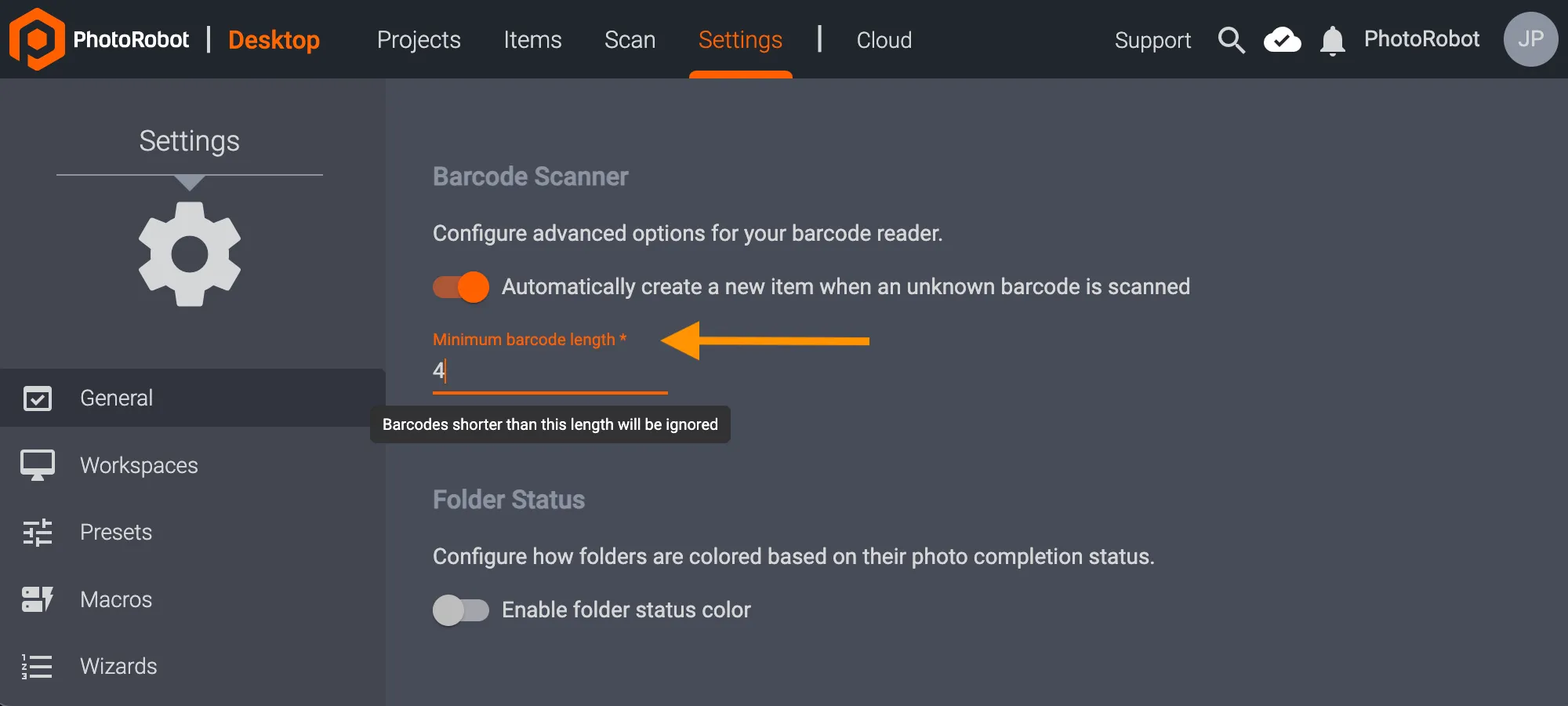
For å justere minimum strenglengde for strekkoder / QR-koder, konfigurer minimum strekkodelengde også i den lokale versjonen av CAPP i Generelle innstillinger - Strekkodeskanner. Strekkoder som er kortere enn lengdeinngangen vil da bli ignorert av systemet.
Notat: Etter at et element har blitt tildelt en strekkode i systemet, vil strekkoden også være tilgjengelig direkte i grensesnittet for fangstmodus i området Vareinformasjon via en strekkodeknapp.
Gi kunden ekstern tilgang til prosjektdata
For å jobbe med kunder utenfor organisasjonen til en betalt CAPP-konto, kan en administrator av kontoen opprette klientkontoer gratis. Kundekontoer gjør det mulig for en ekstern kunde å vise prosjektdata, delta i kvalitetssikring gjennom gjennomgang og kommentarer, og få tilgang til prosjektressurser for nedlasting. Denne funksjonen er ment for situasjoner der et fotostudio jobber med en ekstern kunde som trenger tilgang til spesifikke jobber.
For å dele et prosjekt med en kunde utenfor organisasjonen din, må du først sørge for at du logger på skyversjonen av CAPP ved hjelp av en brukerprofil med administratorrettigheter.
1. Logg på den skybaserte appen ved å bruke en betalt CAPP-kontoprofil med administratorrettigheter, og klikk på brukerprofilmenyikonet øverst til høyre på dashbordet. Klikk deretter på Organisasjon for å få tilgang til administrasjonspanelet.
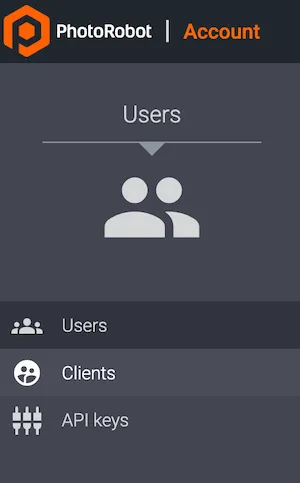
2. Klikk deretter på Brukere fra kontoalternativene øverst i brukergrensesnittet fra Organisasjonsadministrasjon-panelet.

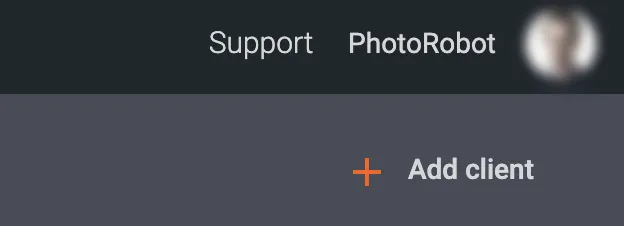
3. Klikk Klienter for å opprette et nytt brukeralternativ for å få tilgang til funksjonen Legg til klienter fra kontogrensesnittet. Knappen + Legg til klienter vises øverst til høyre på dashbordet under brukerprofilikonet.
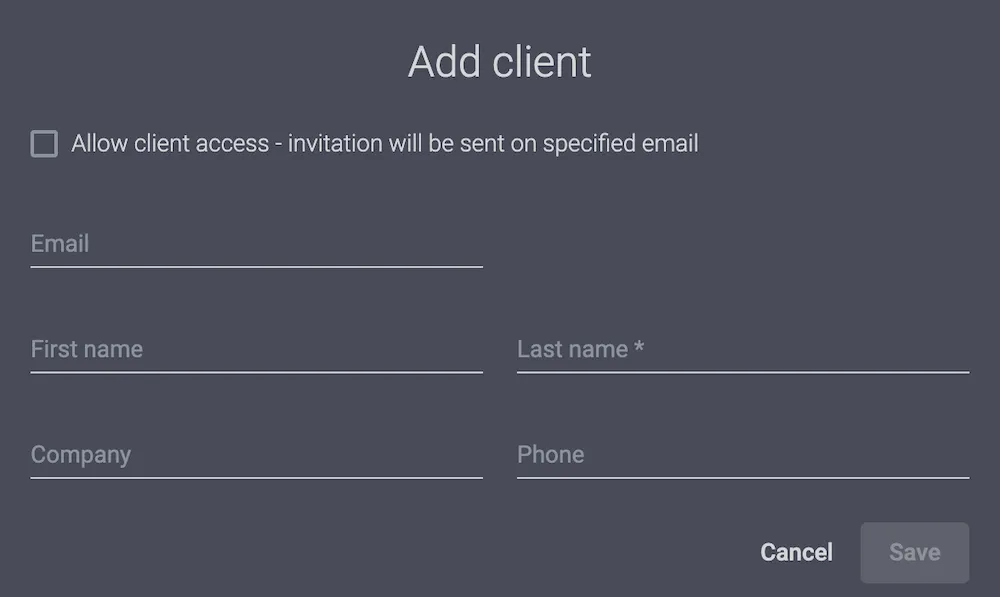
4. Klikk på + Legg til klient under brukerprofilikonet.
5. Fyll ut feltene for klientens informasjon (e-post, navn, firma, telefon), og merk av i boksen Tillat klienttilgang. Se gjennom informasjonen for nøyaktighet, og klikk på Lagre for å legge til klienten i CAPP.
6. Åpne Prosjekter i skyversjonen av CAPP, finn prosjektet du vil dele med den lagrede klienten, hold musen over prosjektlinjen og klikk på deleikonet til høyre for prosjektdetaljene.
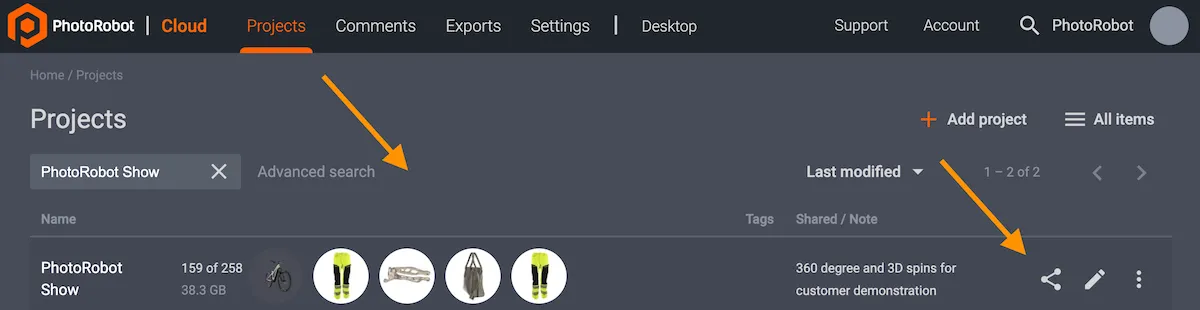
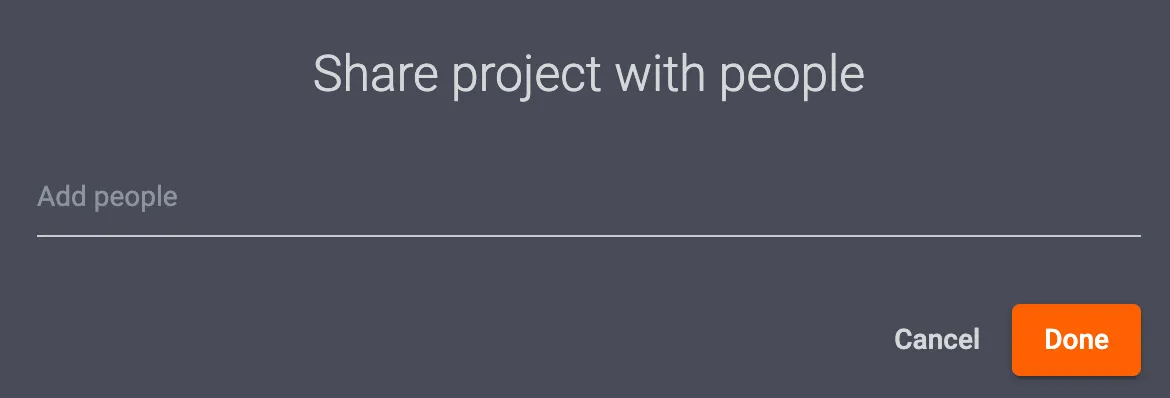
7. Klikk på deleikonet på høyre side av prosjektlinjen for å åpne Del prosjekt med personer funksjonen, velg lagrede klienter og klikk på ferdig. Prosjektet deles nå med kunden, slik at de kan se jobben og kommentere i CAPP for kvalitetssikring og ytterligere instruksjoner om nødvendig.
Grensesnitt for opptaksmodus
Etter å ha klikket på et element, blir du ført til et opptaks- / redigeringsgrensesnitt. Kontrollene som er tilgjengelige for deg, endres basert på om opptaksmodusen er aktiv, eller redigeringsmodusen . Opptaksmodusen brukes til å kontrollere fotograferingssekvensen, mens redigeringsmodusen styrer all etterbehandling utført i CAPP. Den aktive modusen utheves øverst på skjermen:
Legge til en mappe for spinn, stillbilder eller video
Før en fotoseanse må du opprette minst én mappe. Hovedtyper av mapper er spinn (brukes til 360 ° presentasjoner), stillbilder (for stillbilder) og video (for videoer).
Opprette en spinnmappe
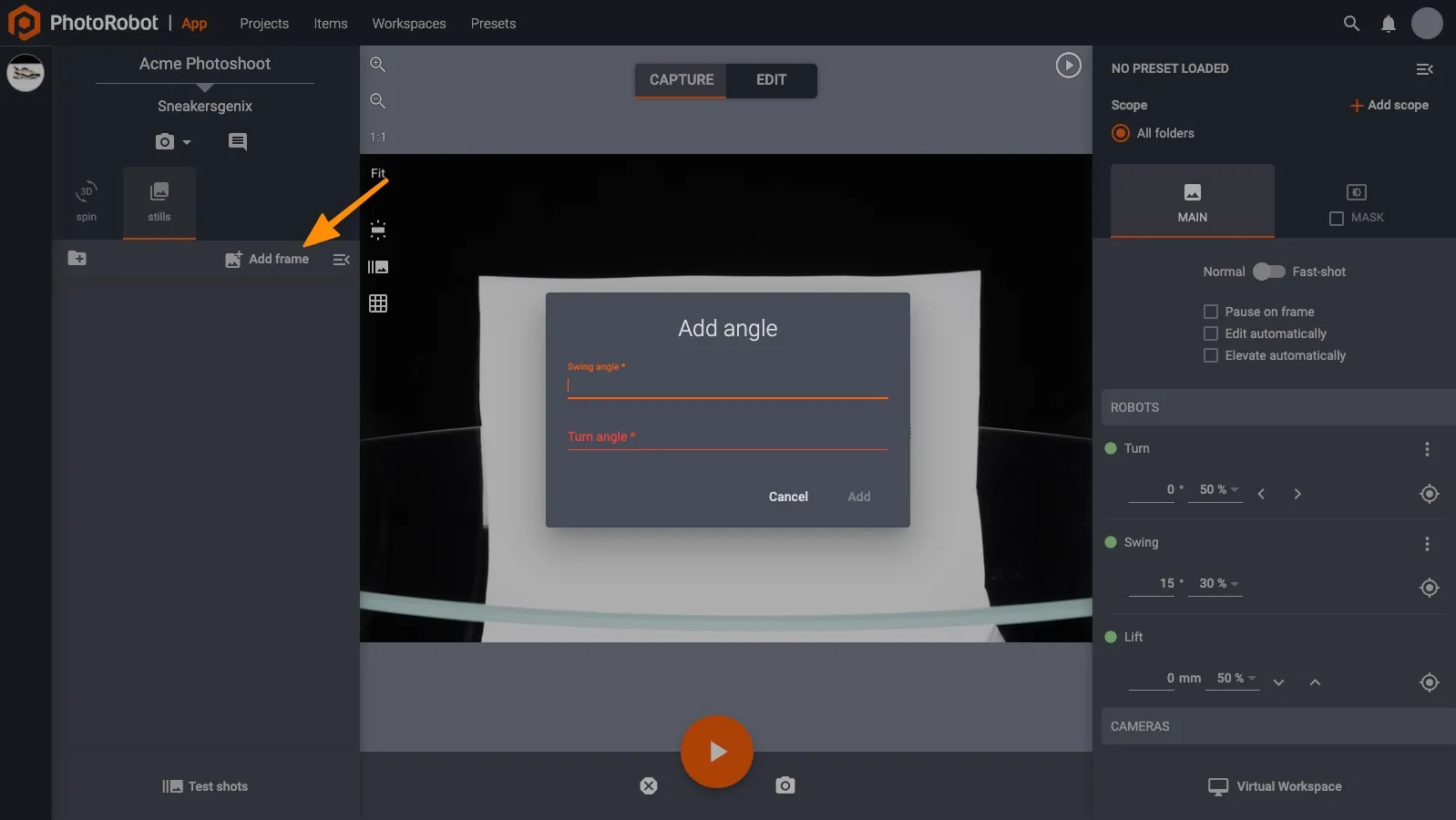
Når du legger til en spinnmappe, vil CAPP automatisk legge til stopp (også kalt "rammer") basert på hvor mange bilder per spinn du velger. Standardnummeret er 36, og dette kan endres nederst til venstre. Med et høyere antall stopp vil rotasjonen bli jevnere, men det vil også ta opp mer lagringsplass.
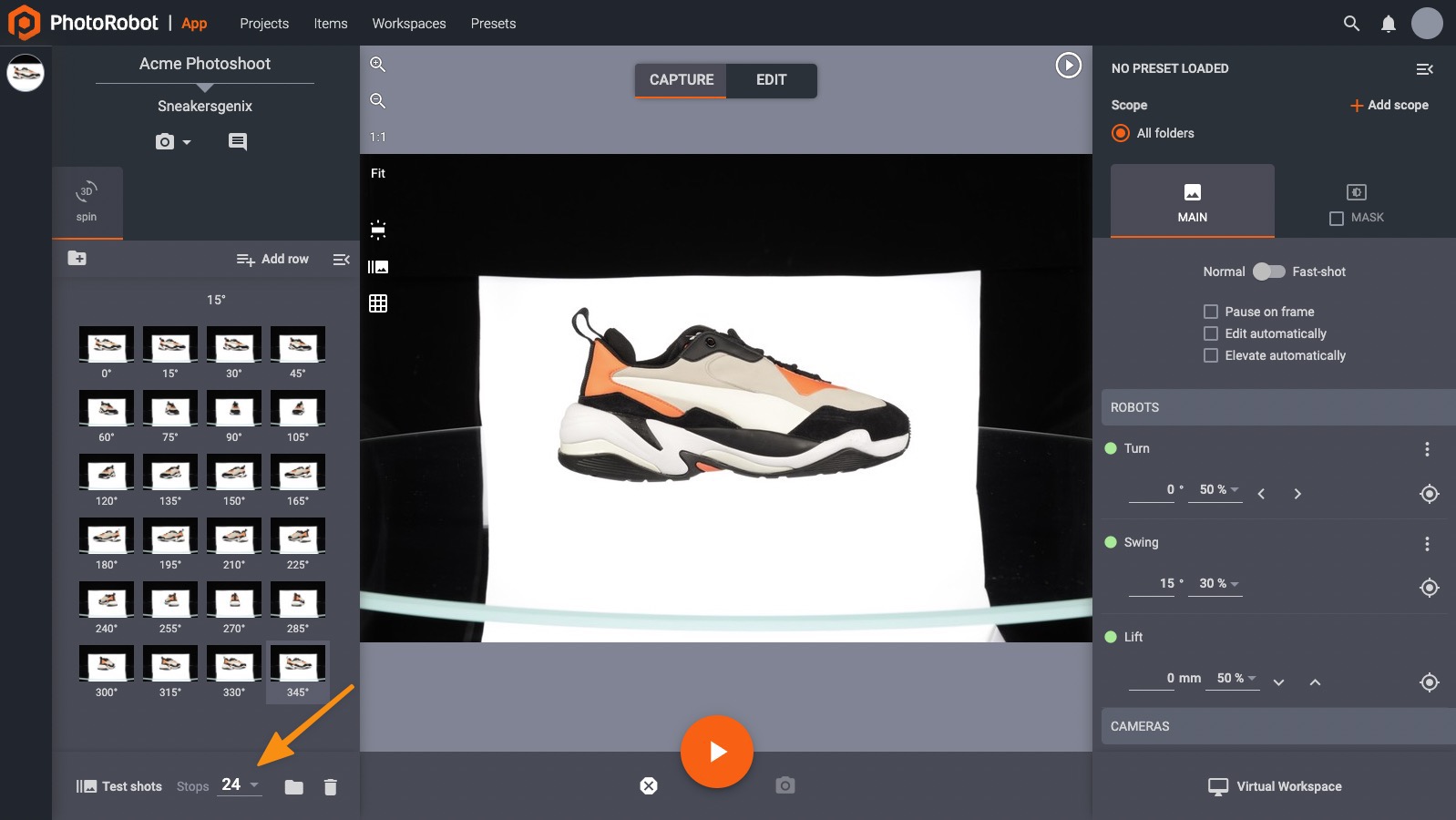
Opprette en Stiller-mappe
Hvis du velger en stillbildemappe, må du legge til stoppene manuelt. Dette vil inkludere en dreievinkel (rotasjonsvinkelen) og en svingvinkel (kameraets vertikale posisjon langs en sirkulær bane). Svingvinkelen er viktig hvis du bruker robotarmen vår eller en annen modul som kan endre kameraets horisontale posisjon.
Importer bilder
I noen tilfeller kan det være lurt å importere bilder til en ny eller eksisterende mappe i CAPP. Ta for eksempel import av håndholdte bilder, detaljerte bilder eller andre diverse bilder.
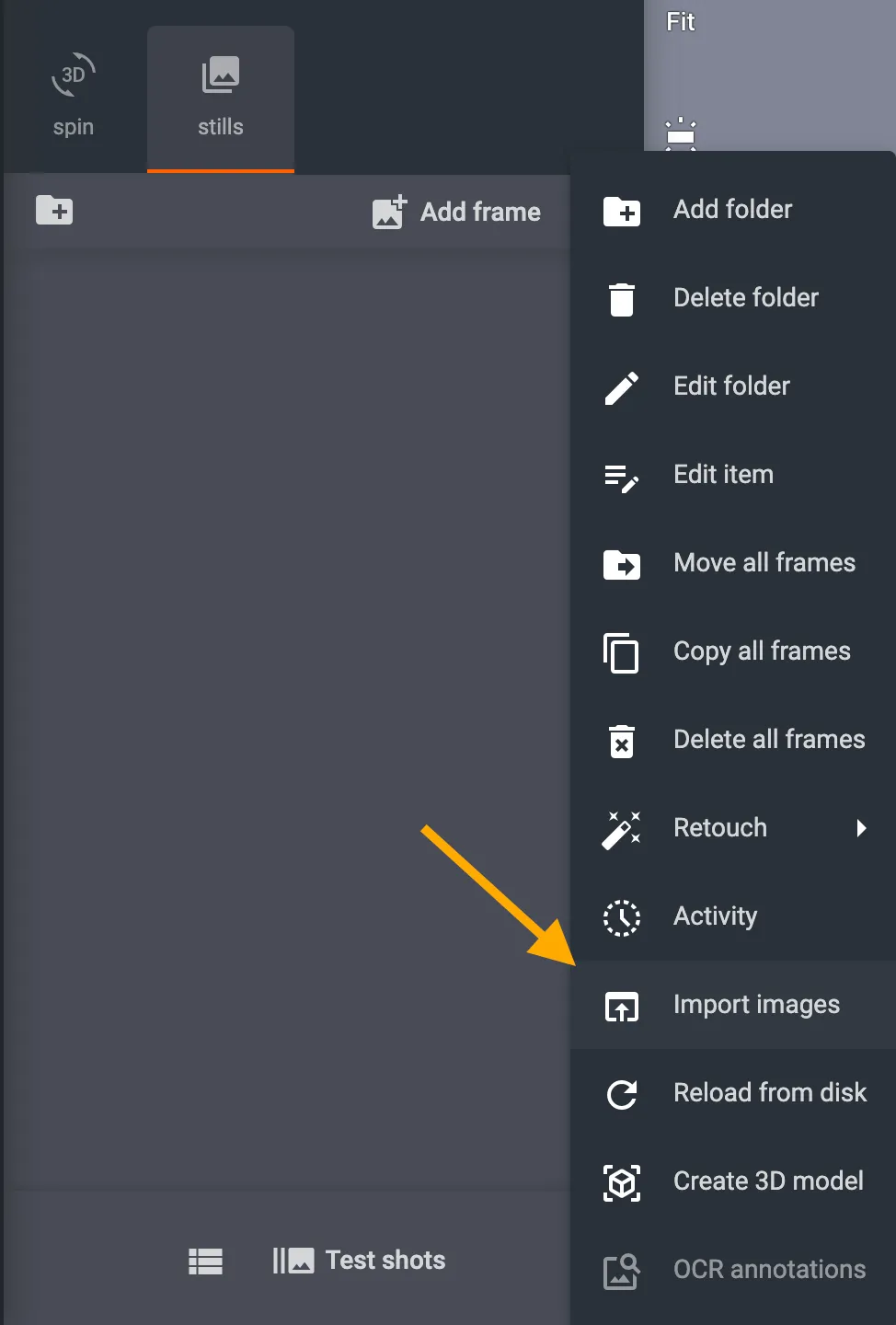
Hvis du vil importere bilder til CAPP, må du først åpne et nytt eller eksisterende element i grensesnittet for skannemodus i CAPP. Deretter klikker du på ikonet for mappeoperasjonsmenyen øverst til høyre i mappegrensesnittet.
Deretter, i menyalternativene for mappeoperasjoner, finn og klikk Importer bilder fra listen.
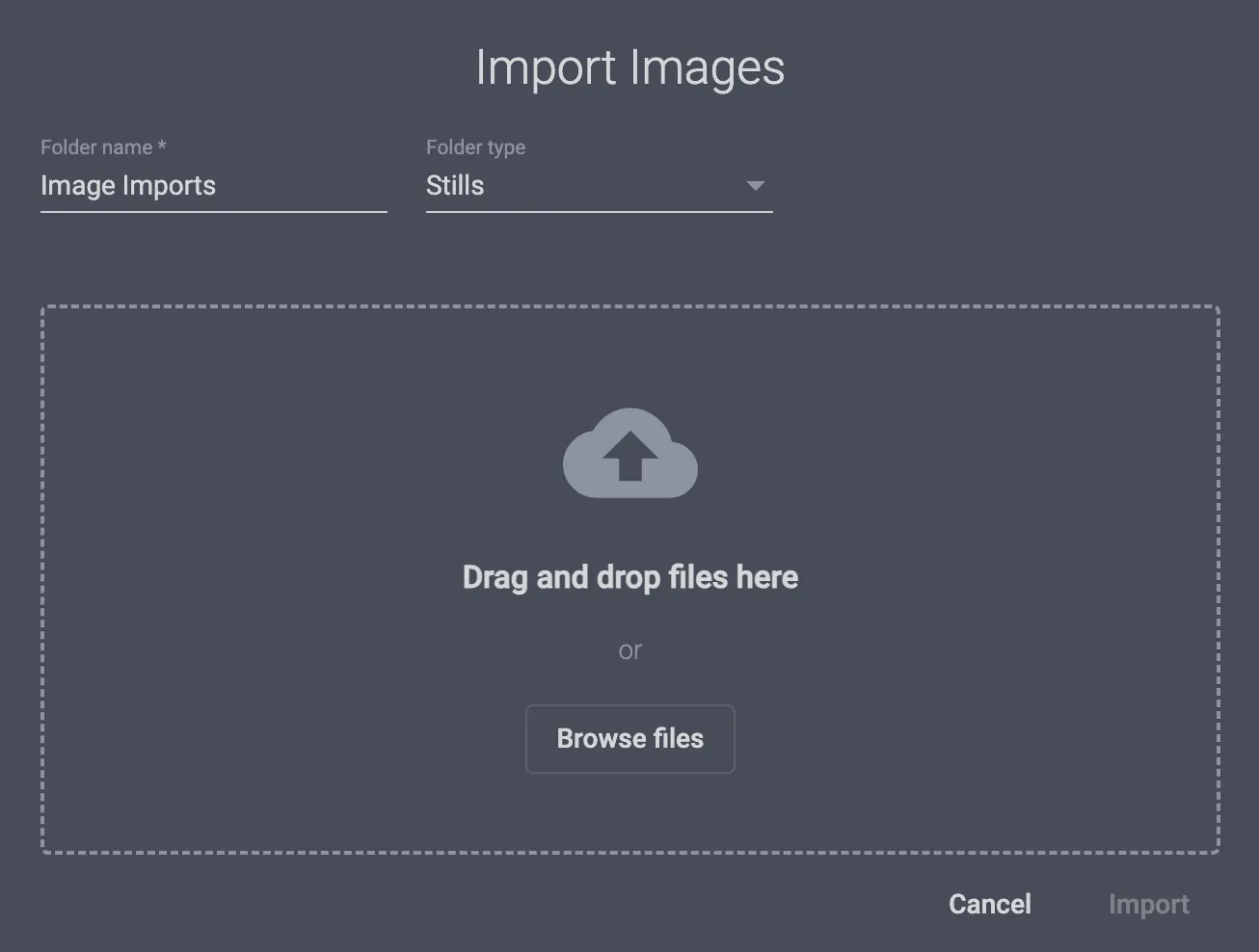
Hvis du klikker på Importer bilder, åpnes et popup-vindu som gjør det mulig å importere bilder ved å dra og slippe, eller ved å bla gjennom lokale filer. Øverst i vinduet er det også mulig å konfigurere mappenavn og mappetype for de importerte bildene.
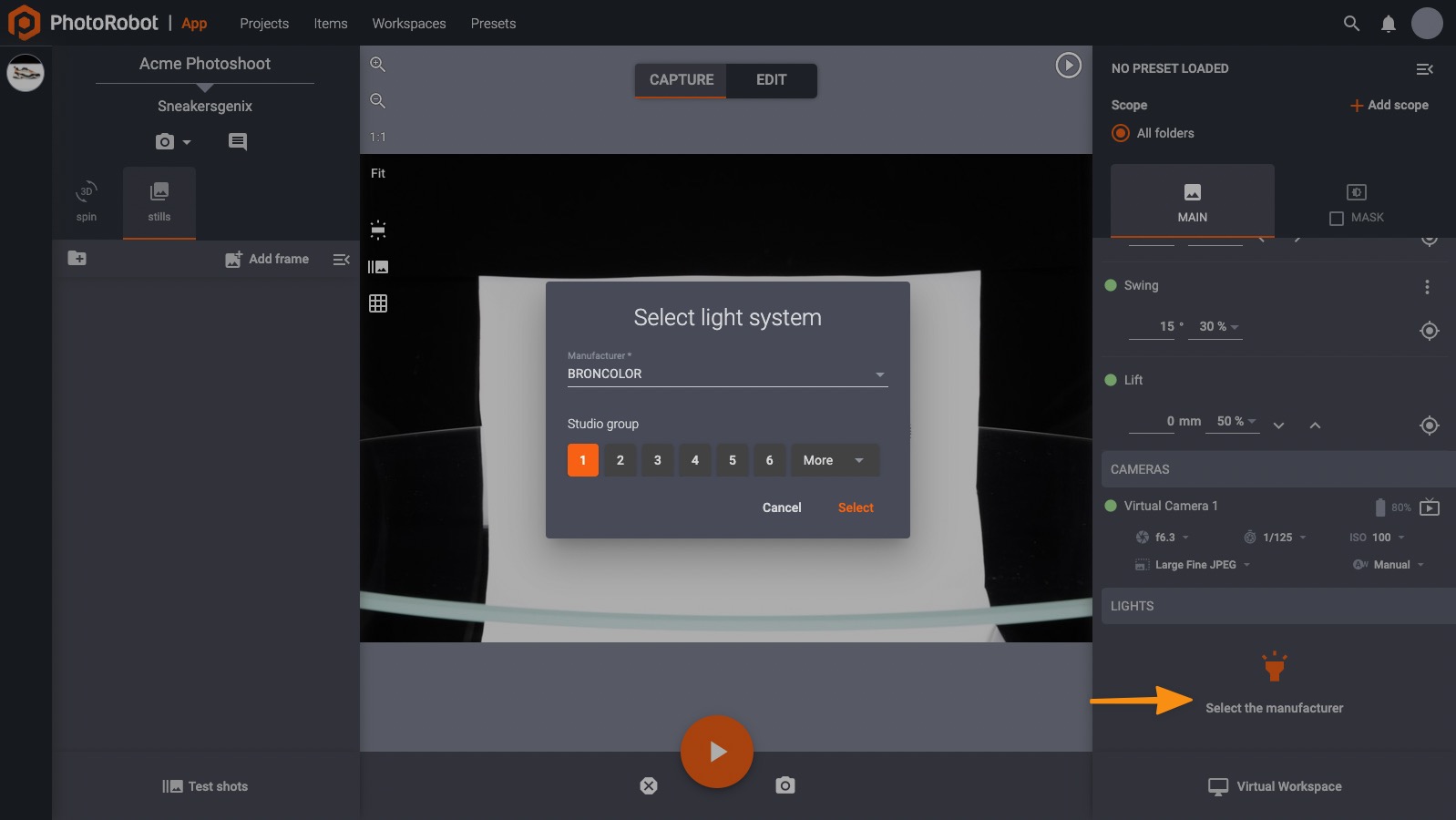
Kontroller kompatible lys
Når du bruker lys som er kompatible med CAPP, kan du velge lys nederst til høyre i redigeringsmodusvinduet.
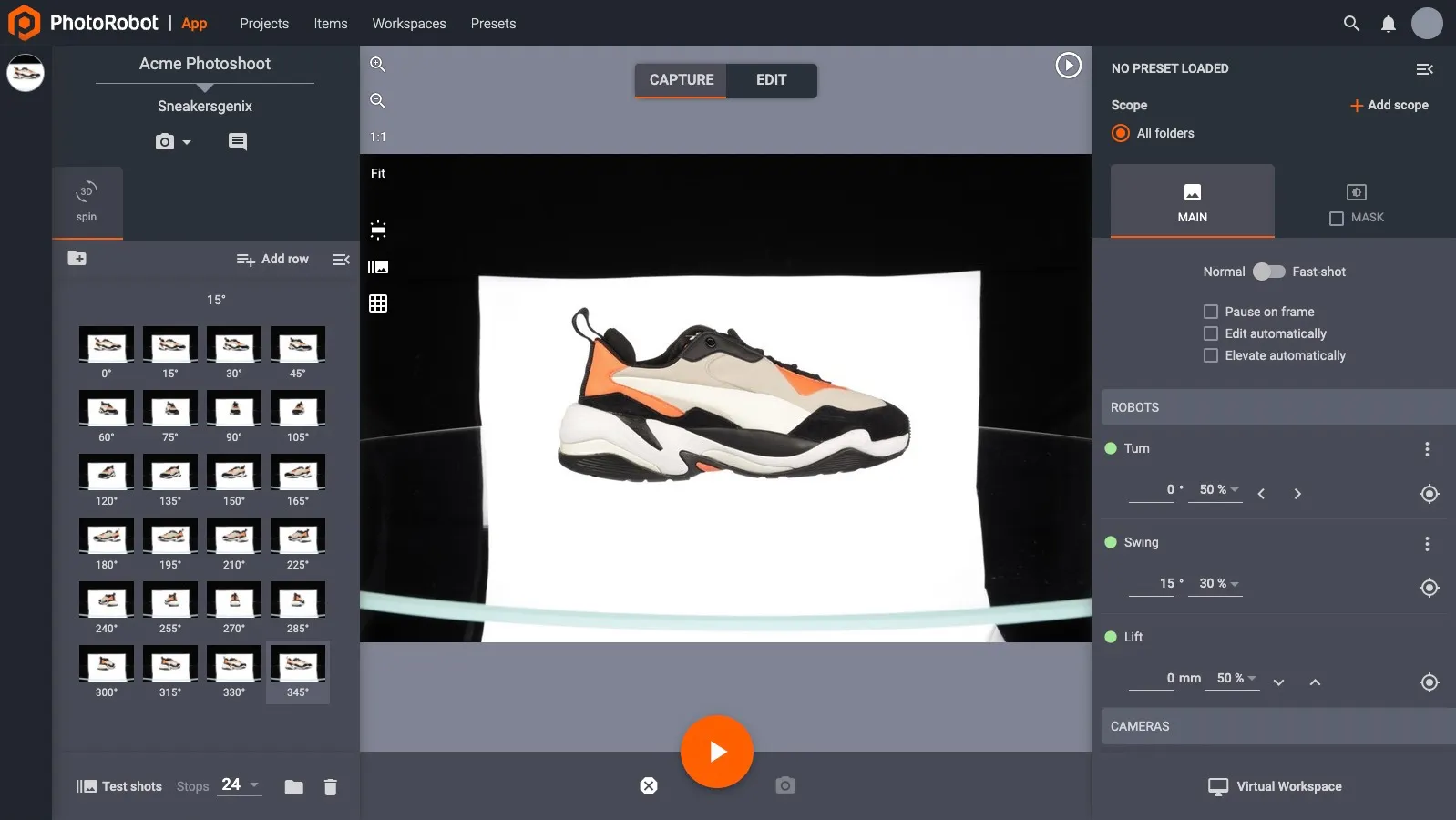
Oversikt over grensesnitt for opptaksmodus
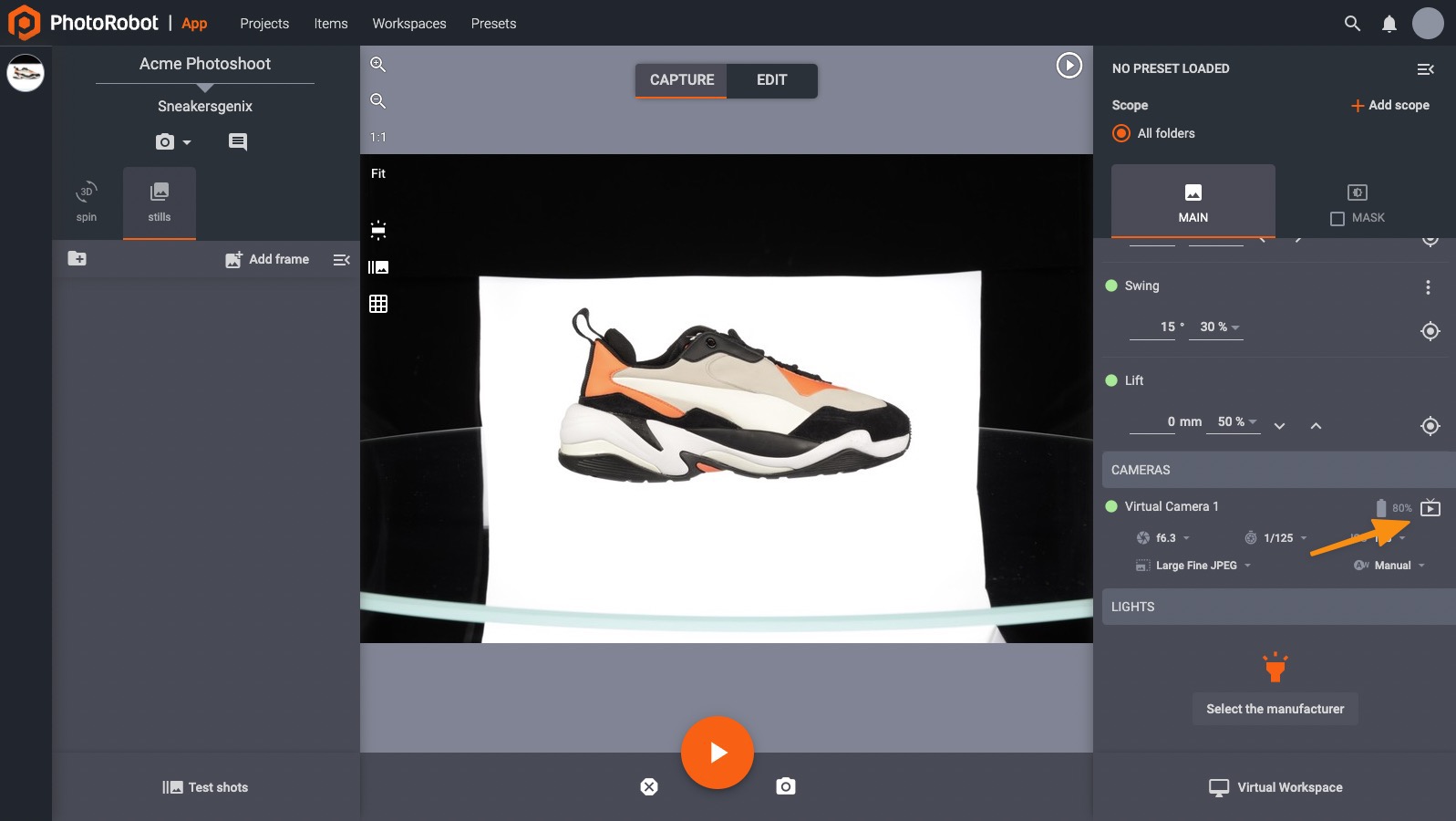
Den sentrale delen av opptaksmodusgrensesnittet inkluderer forhåndsvisningsvinduet, som enten viser det valgte bildet (hvis du allerede har tatt noen) eller live view streamet fra kameraet.
Live View, som er nyttig hvis du vil kontrollere ro og fokus, kan veksles i kamerakontrollområdet i den sentrale delen av kontrollinjen på høyre side av skjermen.
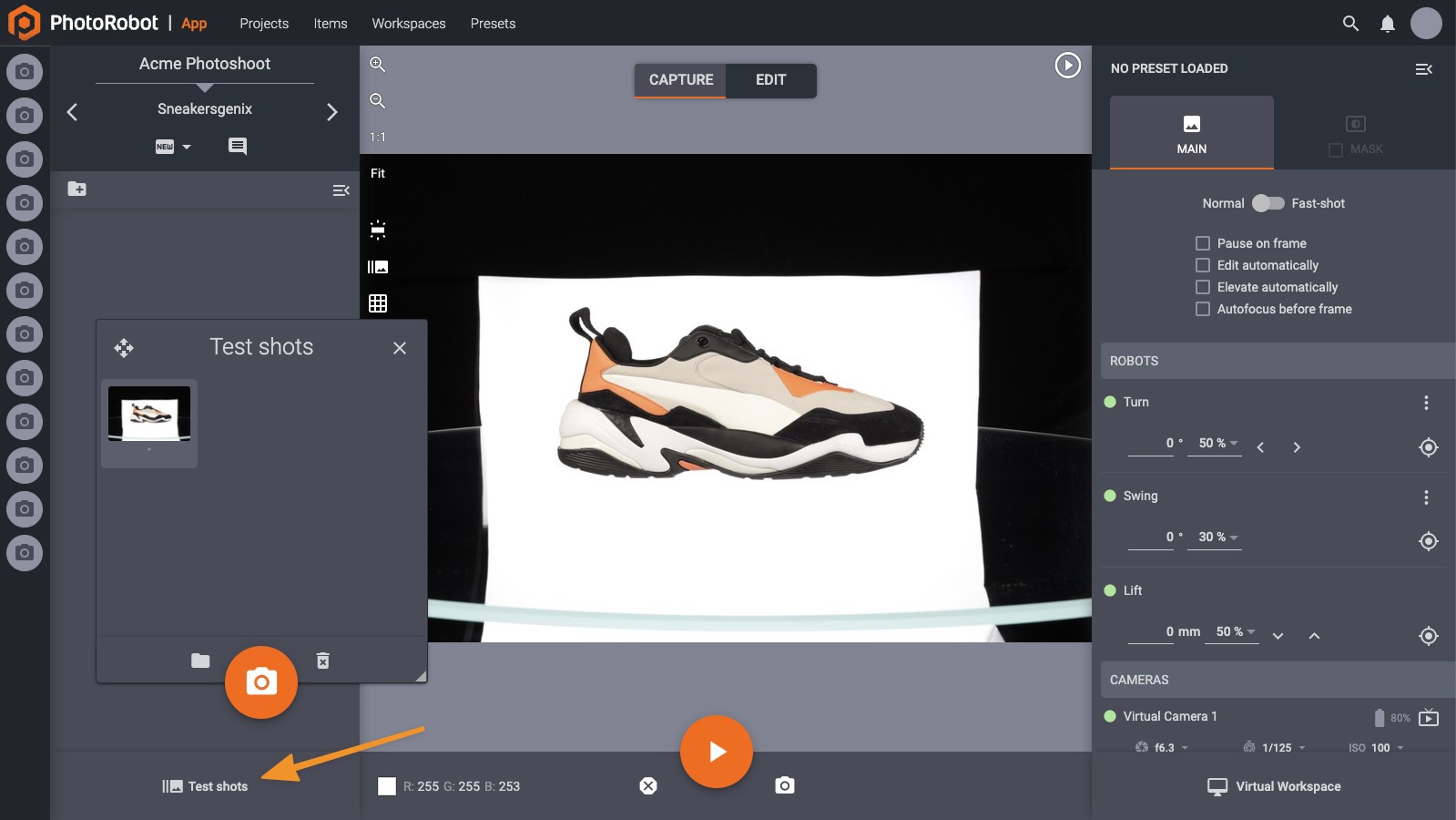
Ta testbilder
Før du tar endelige bilder, er det lurt å ta ett eller flere testbilder. Den enkleste måten å gjøre dette på er å trykke på T-tasten på tastaturet. Dette vil hjelpe deg med å sjekke om du bør endre innstillingene til lysene, kameraet osv. Testbilder lagres i "testbilde" -mappen, som du kan få tilgang til nederst til venstre på skjermen.
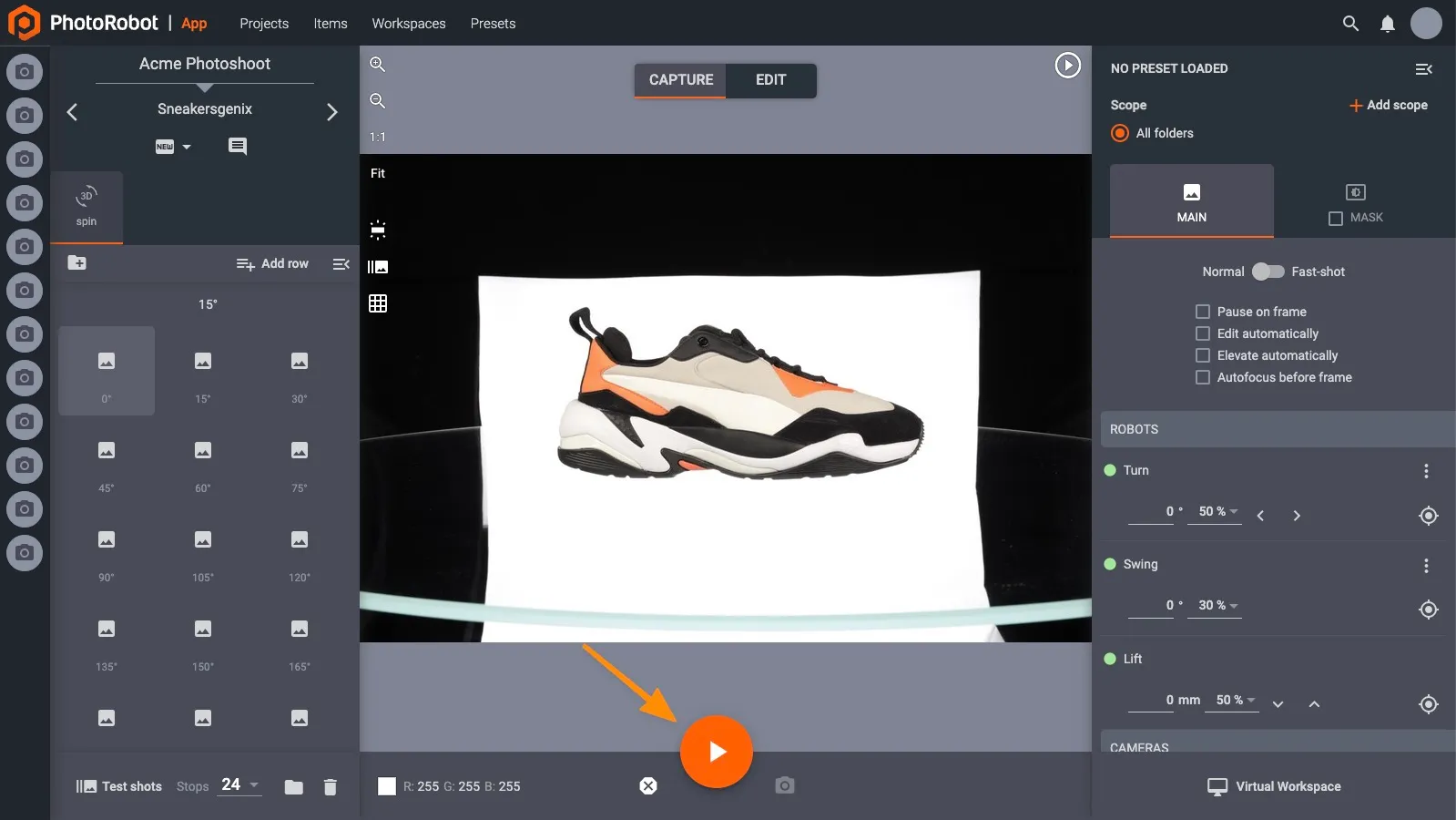
Starte en fotograferingssekvens
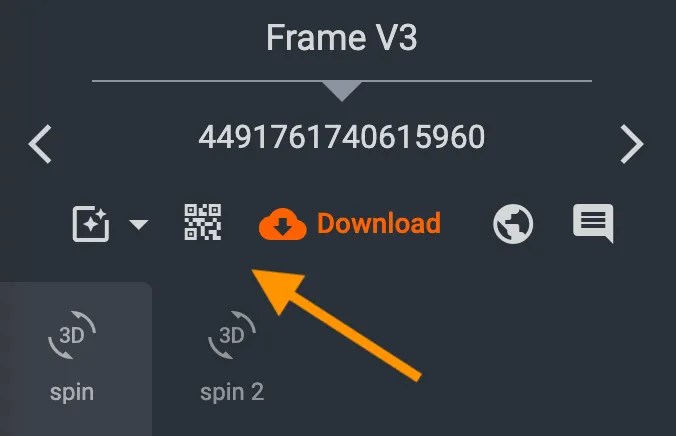
Når du er fornøyd med innstillingene, som ble bekreftet ved å ta et testbilde, er det på tide å kjøre fotograferingssekvensen. Dette kan utløses ved å trykke på mellomromstasten på tastaturet eller ved å klikke på "start" -knappen som vises på bildet nedenfor.
Hvis du har en strekkodeskanner, kan du også utløse sekvensen ved å skanne en spesiell "start"-strekkode. Last ned PhotoRobot "start"-strekkoden på nettet, og skriv den ut for å bruke denne funksjonen.

Du vil vite at sekvensen er fullført hvis alle miniatyrbilder på venstre side er fylt med bilder. Det er en god praksis å være oppmerksom på eventuelle feilbranner av strobelysene.
Hvis noen av miniatyrbildene er mørkere sammenlignet med de andre, senk rotasjonshastigheten eller kontroller om nødvendig tilstanden til lysene dine. Du kan deretter merke disse bildene og skyte dem på nytt uten å måtte kjøre hele sekvensen igjen.
Når opptakssekvensen er fullført, kan du bytte til redigeringsmodus, som er der du skal utføre etterbehandling.
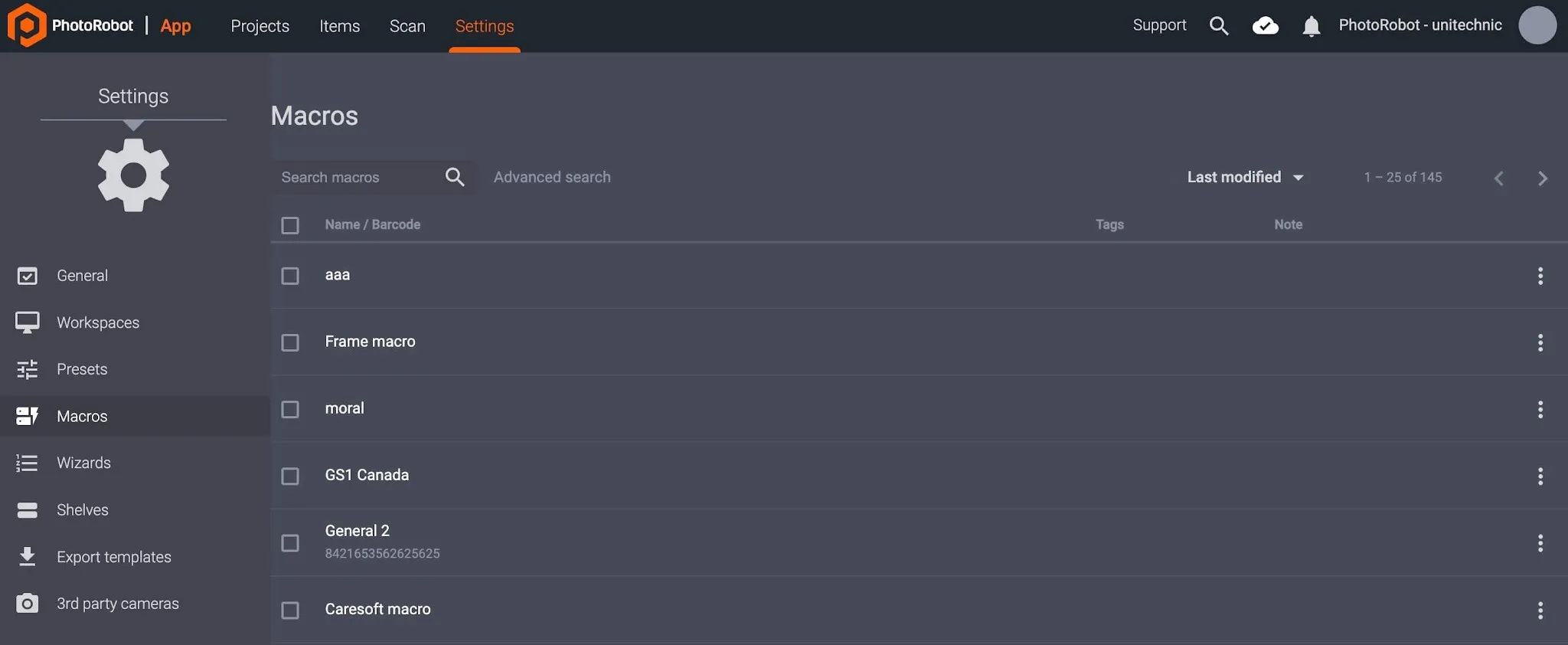
PhotoRobot Makroer
Makroer i CAPP gjør det mulig for brukere å definere kommandoer for fangstprosessen av et element og dets mapper (spinn, stillbilder osv.). Kommandoer kan brukes på individuelle eller flere mapper, kjøre sekvenser, bilderedigeringer, arbeidsområder, forhåndsinnstillinger, kopiere bildeinnstillinger og flytte bildeinnstillinger. Brukere kan også tilpasse makroer ytterligere etter navn, strekkode, tag eller notater.
Merk: For detaljerte instruksjoner om konfigurasjon og bruk av PhotoRobot-makroer, se PhotoRobot-makrobrukerhåndboken. Finn ut hvordan makroer muliggjør fotograferingsautomatiseringens magi på tvers av flere mapper og komponenter, med automatisk behandling av komplekse oppgaver.
PhotoRobot Veiviser-modus
Veiviser-modus i CAPP fungerer som et alternativ til manuell maskinvare-, kamera- og sekvenskonfigurasjon. I bruk gjør veiviser-modus det mulig for en administrator eller fotograf å lage forskjellige veivisere for å forenkle opptaksmodus for produksjonslinjeoperatører. En operatør kan deretter starte CAPP i veiviser-modus, som fungerer som et ekstremt enkelt grensesnitt med veiviser-styrte trinn. Det er også begrensede kontroller for brukervennlighet og opplæring.
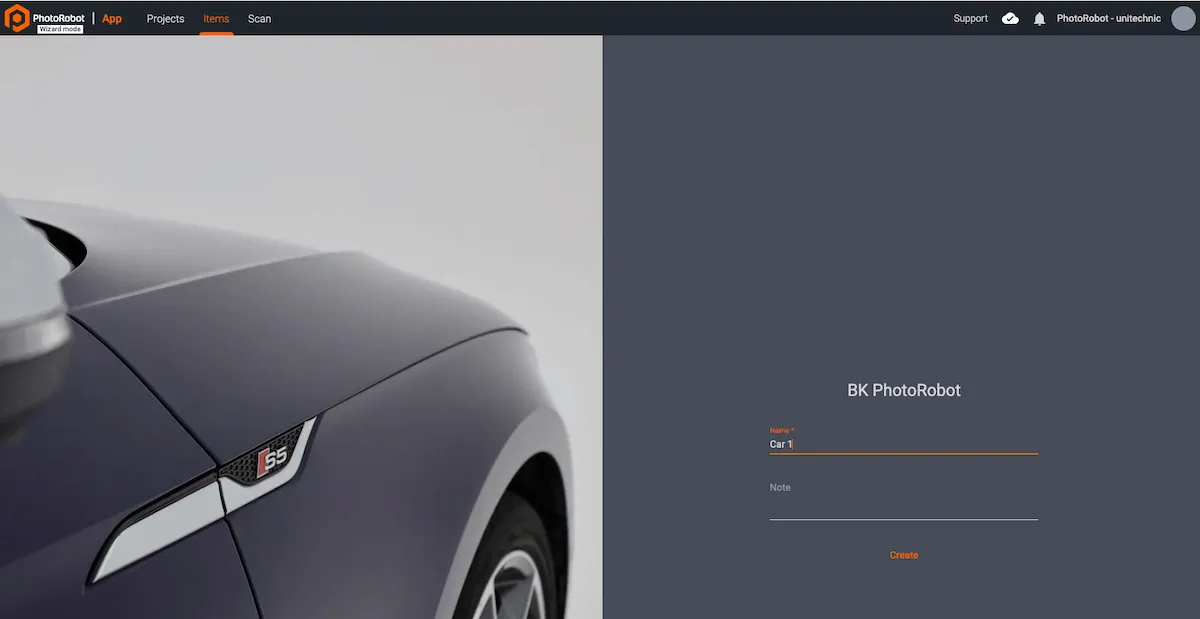
Etter å ha opprettet en veiviser, lagrer den forhåndsinnstillinger og arbeidsområdekonfigurasjoner, samt forhåndsdefinerte trinn operatører må følge. Operatører kan ikke justere noen innstillinger, og de må fullføre instruksjonene i hvert trinn før de kan gå videre til neste prosess.
Merk: Veivisertrinn er definert i et JavaScript-lignende språkformat, og skriptes av PhotoRobot-konsulenter for tilpasset funksjonalitet. Brukere kan også skripte grunnleggende funksjoner for innledende eksperimenter eller enkle oppsett. For dokumentasjon om teknisk konfigurasjon og operatørbruk av veivisere, se PhotoRobot Veivisermodus Brukerhåndbok.
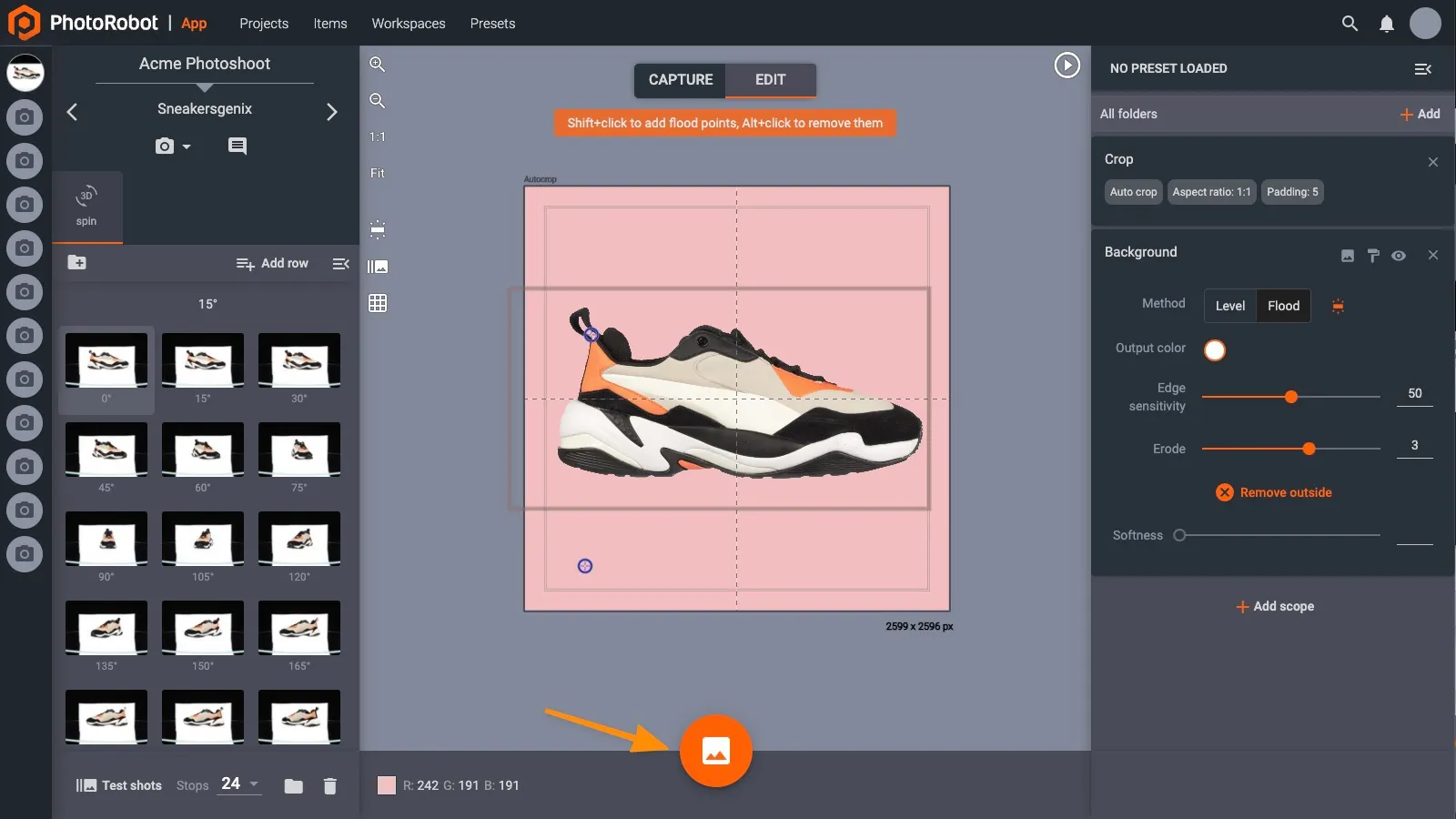
Grensesnitt for redigeringsmodus
På høyre side av skjermen kan du legge til et hvilket som helst antall redigeringsoperasjoner:
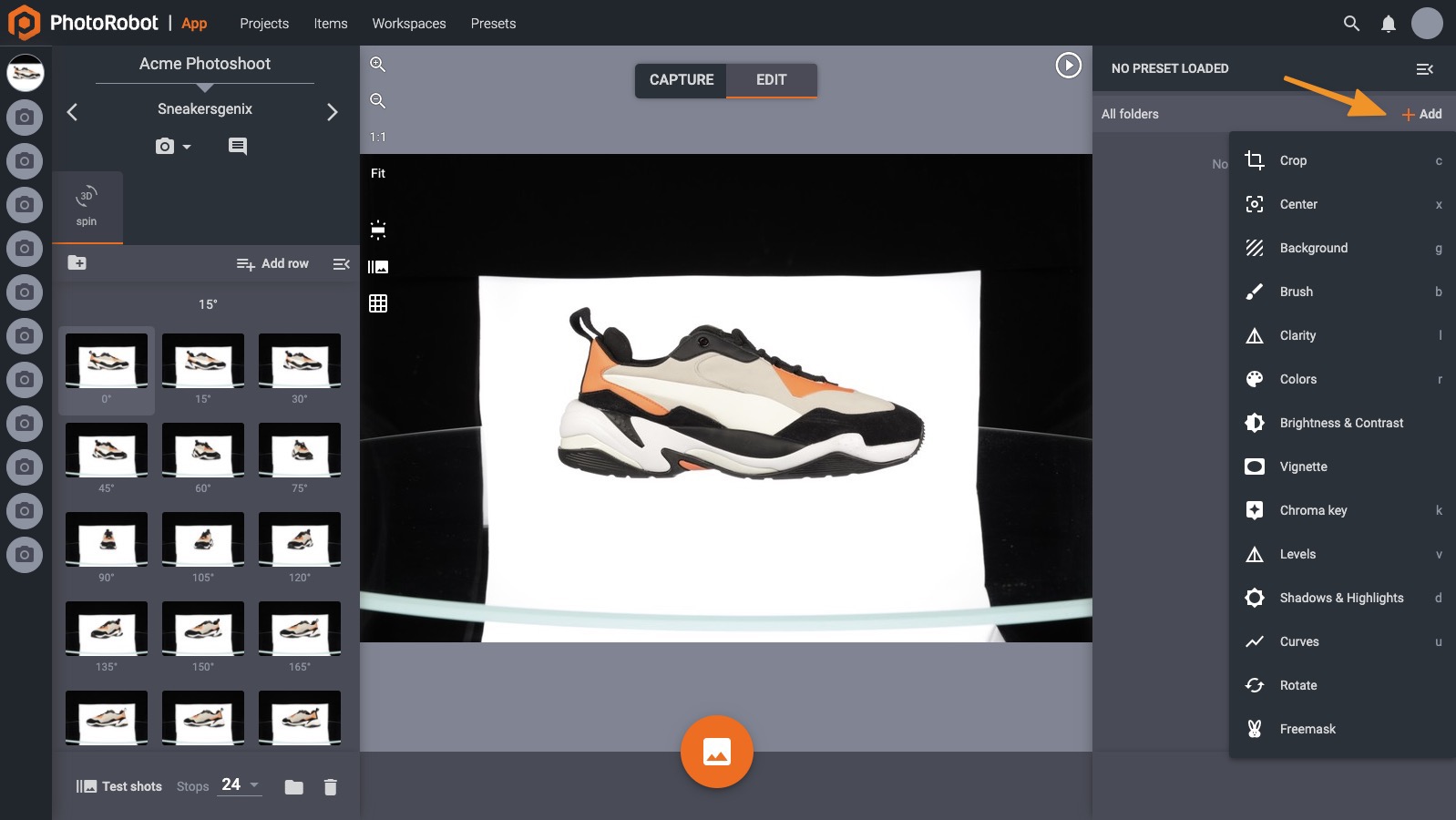
Noen av de vanligste redigeringsoperasjonene er oppført øverst: beskjæring, midten og bakgrunnen.
Automatisk beskjæring
Beskjær - når du beskjærer bilder, er det tre hovedkontroller: veksleknappene for automatisk beskjæring, størrelsesforhold og utfylling (som styrer hvor mye plass det er rundt det fotograferte objektet).

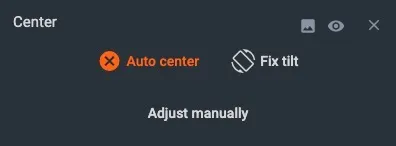
Automatisk midtstilt
Senter - selv om de fleste PhotoRobot maskiner er utstyrt med lasere som hjelper til med å plassere objekter på overflaten, vil de fleste bilder trenge ekstra programvaresentrering. Dette er spesielt viktig for 360° spinn. Når du kommer i gang, anbefales det å holde "auto center" -funksjonen på, som vist på bildet nedenfor:
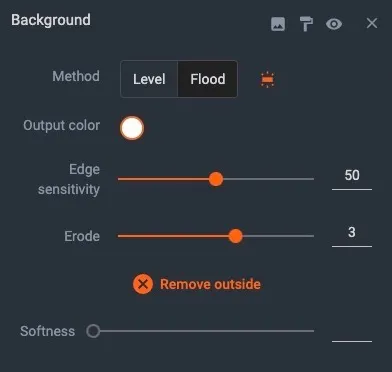
Fjerning av bakgrunn
Bakgrunnsoperasjonen vil justere bakgrunnen til et bilde eller bildesett, og fjerne bakgrunnen fullstendig om ønskelig. Ulike resultater kan oppnås ved de tre forskjellige metodene for fjerning av bakgrunn i CAPP. Det er bakgrunnsfjerning etter nivå, bakgrunnsfjerning ved flom og ved frimaskering.
- Fjerning av bakgrunn etter nivå bruker programvareanalyse av RGB-fargenivåer og lysstyrkeverdier for å identifisere bakgrunnen og forgrunnen. Dette er fordelaktig når du fotograferer lyse eller hvite gjenstander, og når du bruker et hvitt bakteppe. Juster nivåene i programvaren for å gjøre bakgrunnslysstyrken høyere i intensitet til den blir ren hvit. Det er da mulig å gjøre bakgrunnen gjennomsiktig, eller å bytte inn bakgrunner i forskjellige farger.
- Fjerning av bakgrunn ved flom fungerer etter lignende prinsipper som bakgrunnsfjerning etter nivå, og er oftest nyttig når du fotograferer mørkere gjenstander. Hvis du fjerner bakgrunnen ved flomoperasjonen, blir bakgrunnslysstyrken mer intens til den blir ren hvit rundt elementet. Men i stedet for å justere nivåer, bruker verktøyet et valgt punkt for å identifisere bakgrunnen og "oversvømmer" deretter det området. Brukere klikker ganske enkelt på et punkt utenfor det fotograferte objektet. Programvaren oppdager deretter kantene på objektet, og bruker flom for å fylle ut den tilgjengelige plassen rundt det.
- Frimaskering av bakgrunnsfjerning krever mer konfigurasjon enn å bruke nivåer eller flom, men det kan være en av de mest presise og raskeste metodene. Denne metoden bruker et utskåret maskebilde og et hovedbilde av produktet, og setter sammen de to bildene for å fjerne bakgrunnen. Noen ganger er dette den eneste effektive måten å fjerne bakgrunnen rundt mer "vanskelige" objekter. Ta for eksempel reflekterende gjenstander, eller gjenstander som inneholder områder med tom plass. Frimaskering identifiserer objektet kontra alt tomt rom, mens bakgrunnen rundt elementet fjernes og inne i det om nødvendig. Metoden krever imidlertid ytterligere konfigurasjon av studiolys for å lage hoved- og maskebilder for fjerning av bakgrunn.
Notat: Husk at hvorvidt CAPP vil være i stand til å fjerne bakgrunnen eller ikke, avhenger hovedsakelig av hvordan scenen er opplyst. Hvis du ikke finner innstillinger som fungerer tilfredsstillende, kan du ta bildene på nytt med forskjellige lysinnstillinger.
Når du er fornøyd med redigeringsinnstillingene dine, bruker du parametrene ved å klikke på "bruk" -knappen, som ligger der tidligere "start" -knappen dukket opp.
Publisere bilder
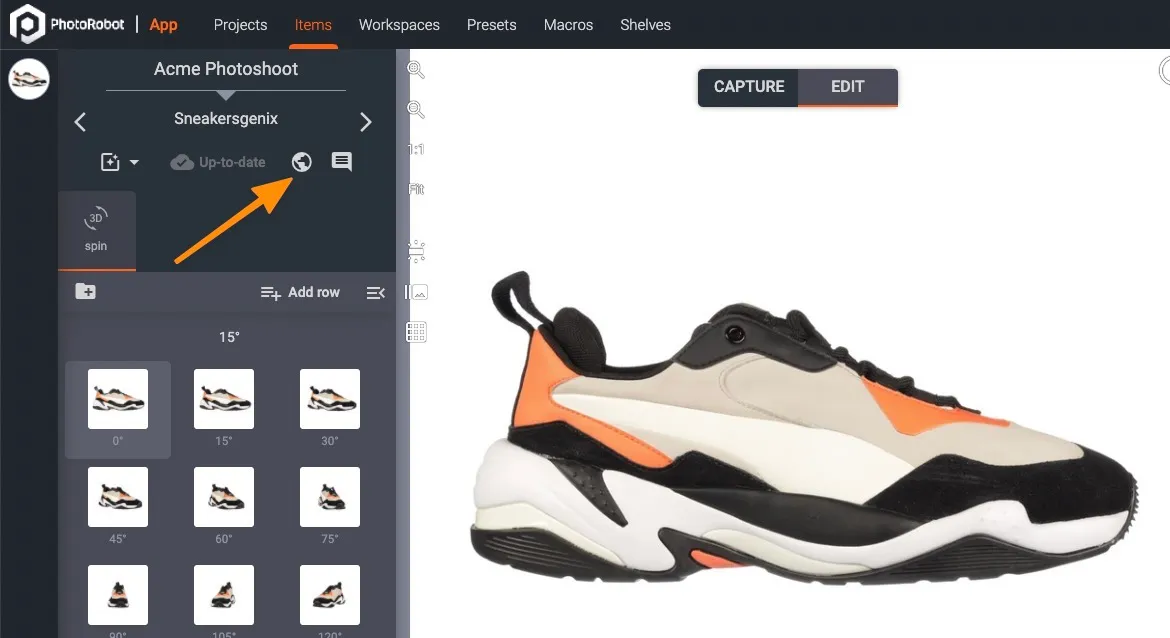
Når fremdriftsindikatoren er kommet til slutten, er endringene brukt på bildene. Hvis du bruker CAPP uten PhotoRobot Cloud-tjenester, lagres de resulterende bildene i en mappestruktur på den lokale stasjonen.
Hvis du bruker PhotoRobot Cloud hosting, kan du også finne filer i PhotoRobot skylagring. For å få tilgang til disse, klikk åpne i skyen i Bilder-delen øverst til venstre på skjermen.
Eksportere bilder
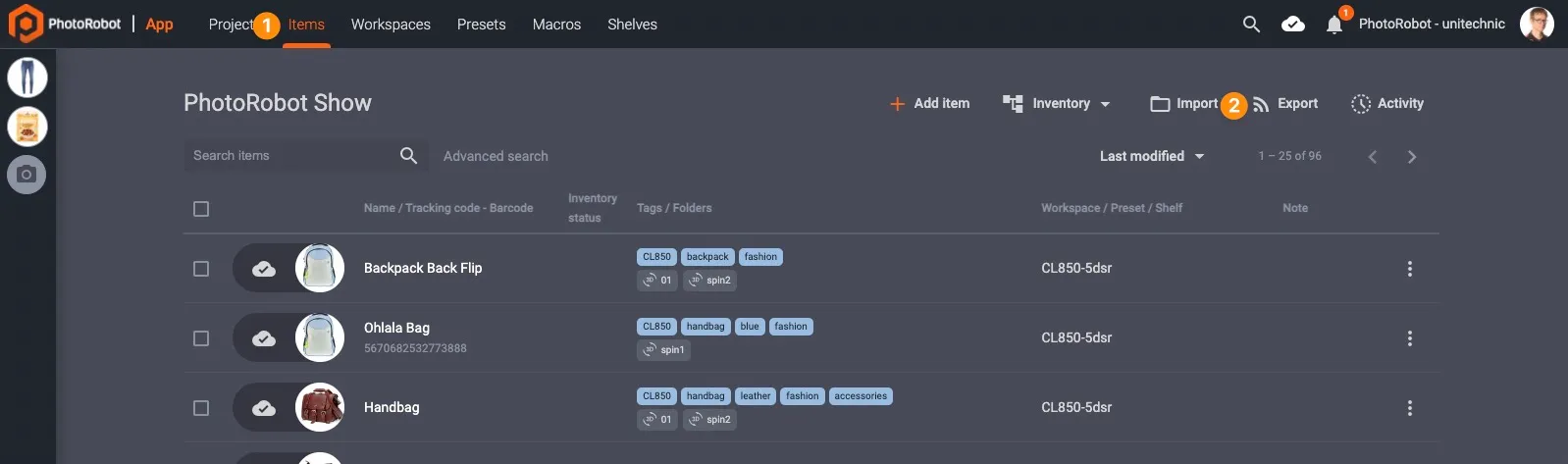
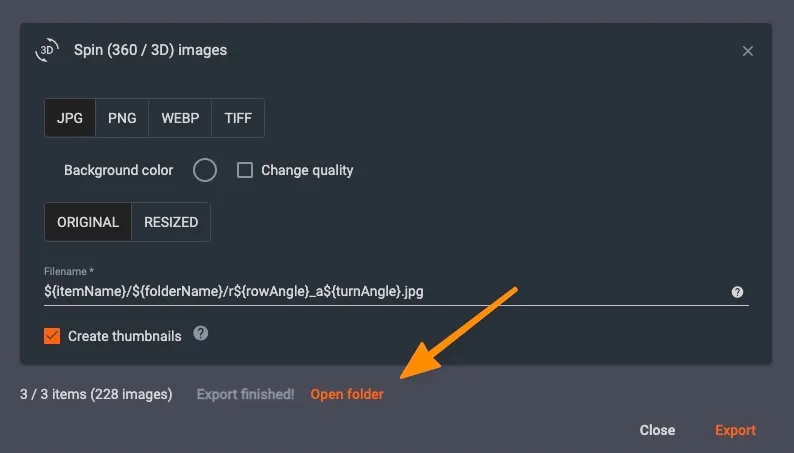
For å eksportere et element fra CAPP, kan brukere eksportere til en lokal disk eller eksportere til PhotoRobot Cloud. Elementeksport gjør det mulig å definere elementer med egendefinerte navnekonvensjoner, angi bildeformat, oppløsning og ulike filnavnmalvariabler.
Du får tilgang til innstillingene for elementeksport ved å gå til Elementer-delen og klikke på Eksporter i menyen over elementlisten:
Følgende vindu åpnes, slik at du kan endre eksportinnstillingene:
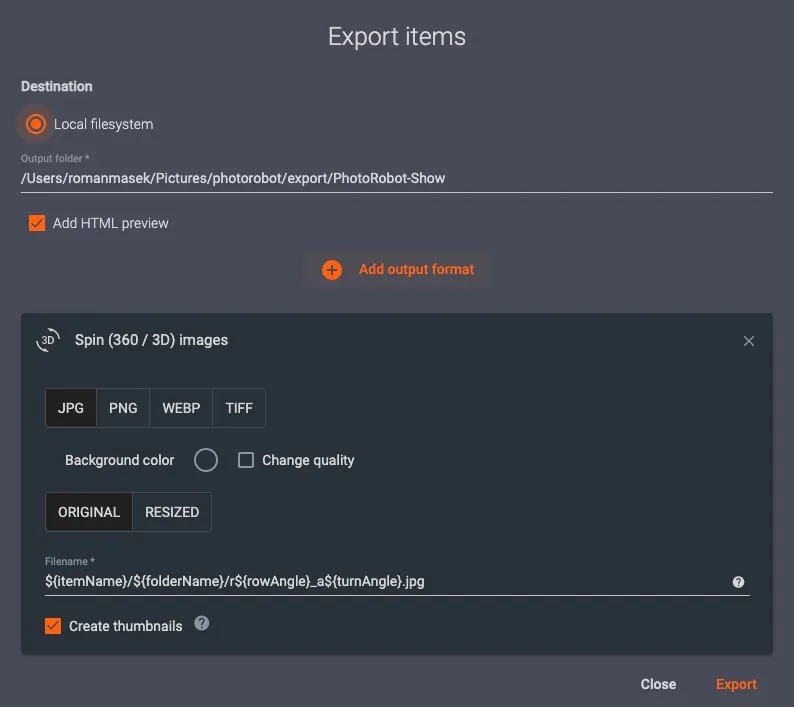
Kjør eksportprosessen ved å klikke Eksporter-knappen nederst til høyre i dette vinduet.
Når eksportfremdriftslinjen er nådd slutten, kan du klikke Åpne mappe for å få tilgang til de eksporterte bildene.
Publiser via sky
Hvis du publiserer via PhotoRobot Cloud-tjenester, må du først åpne elementet i skyen. Grensesnittet viser den innspilte avbildningen. Klikk på Knappen Koder og koblinger:
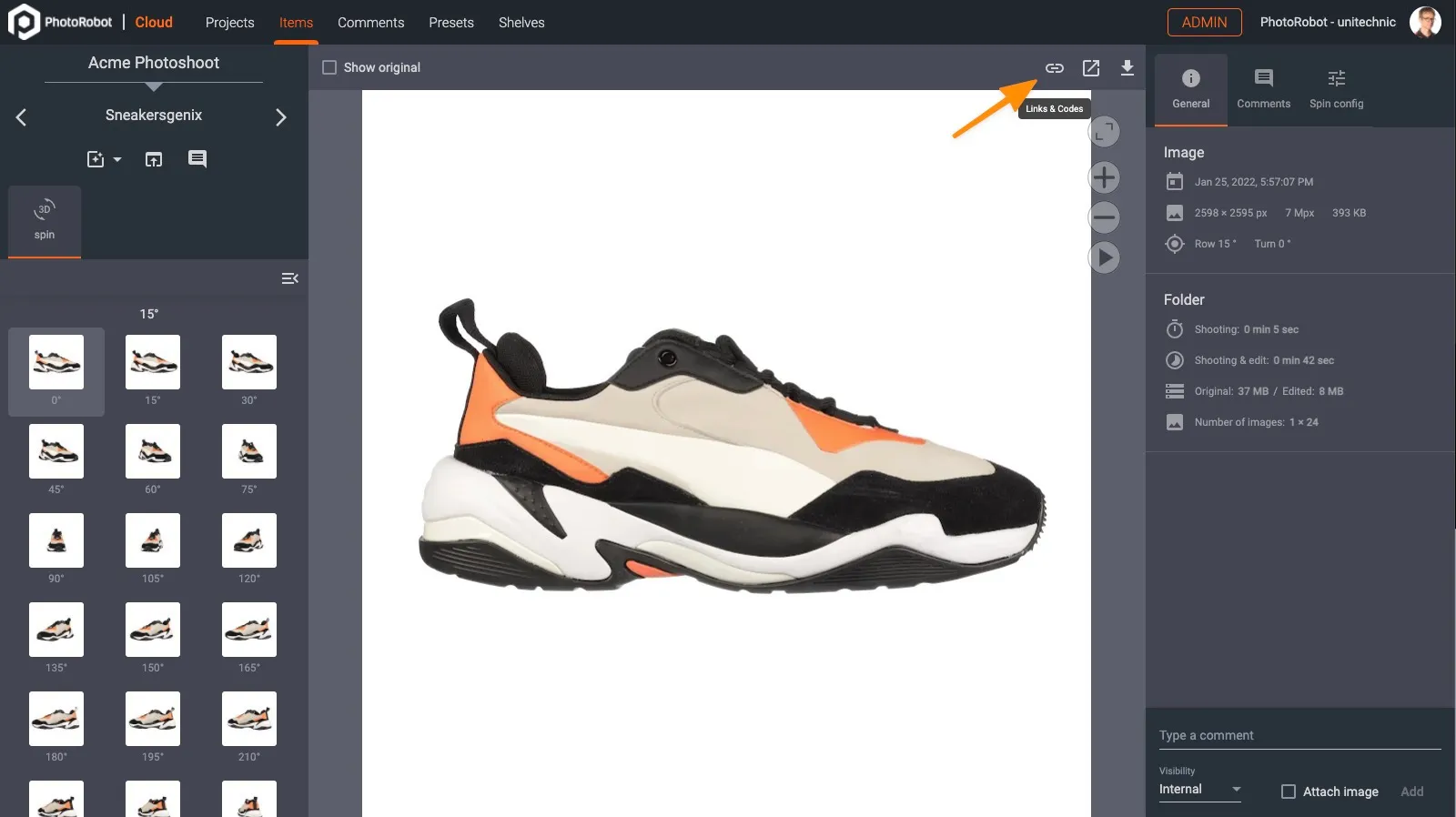
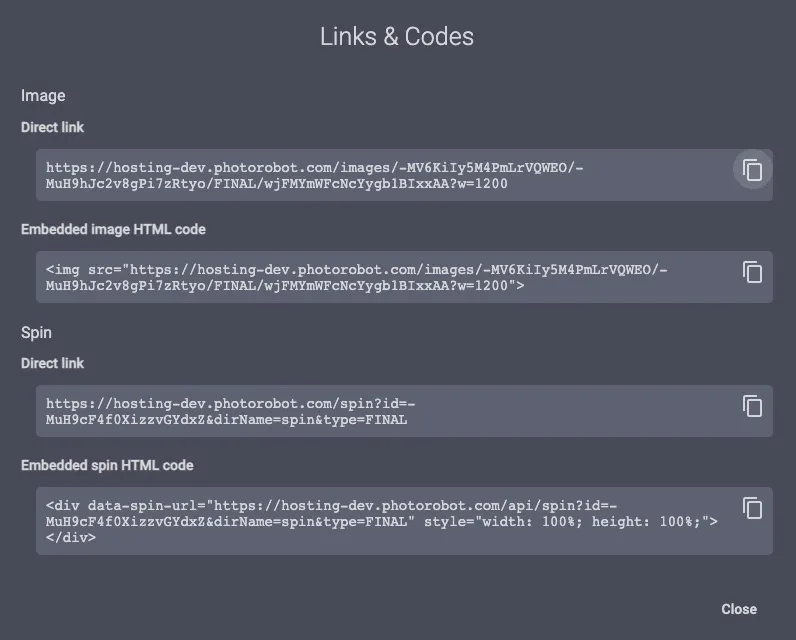
Kopier Direct-koblingen og lim den inn i nettleseren din for å se bildet eller spinnet. Hvis du er fornøyd, kopierer du HTML-koden for innebygd spinn . Lim inn denne koden på siden for å bygge inn spinnet for visning.


EOS Rebel-serien


EOS speilreflekskamera-serien


EOS M-serien med speilløse løsninger


PowerShot-serien


Nærbilde / Håndholdt

Canon EOS Rebel-serien tilbyr nybegynnervennlige speilreflekskameraer med solid bildekvalitet, intuitive kontroller og allsidige funksjoner. Disse kameraene er ideelle for fotoentusiaster, og gir pålitelig autofokus, vribare berøringsskjermer og Full HD- eller 4K-videoopptak.
Forbindelse
Oppløsning (MP)
Resolusjon
Canon EOS DSLR-serien gir bilder av høy kvalitet, rask autofokus og allsidighet, noe som gjør den ideell for både fotografering og videoproduksjon.
Forbindelse
Oppløsning (MP)
Resolusjon
Canon EOS M-serien med speilløse kameraer kombinerer kompakt design med speilreflekslignende ytelse. Med utskiftbare objektiver, rask autofokus og bildesensorer av høy kvalitet, er disse kameraene flotte for reisende og innholdsskapere som søker portabilitet uten å ofre bildekvaliteten.
Forbindelse
Oppløsning (MP)
Resolusjon
Canon PowerShot-serien tilbyr kompakte, brukervennlige kameraer for uformelle fotografer og entusiaster. Med modeller som spenner fra enkle pek-og-skyt-kameraer til avanserte zoomkameraer, gir de bekvemmelighet, solid bildekvalitet og funksjoner som bildestabilisering og 4K-video.
Forbindelse
Oppløsning (MP)
Resolusjon
Canons nærbilder og håndholdte kameraer er utformet for detaljerte bilder og video på nært hold. De er kompakte og enkle å bruke, og tilbyr presisjonsfokus, høyoppløselig bildebehandling og allsidige makrofunksjoner – perfekt for vlogging, produktfotografering og kreative nærbilder.
Forbindelse
Oppløsning (MP)
Resolusjon


